AD717x / AD411x Console Application
Supported Hardware
Supported Devices:
Supported Evaluation Boards:
Supported Carrier Boards:
Introduction
The AD717x/AD411x family offer a complete integrated Sigma-Delta ADC solution which can be used in high precision, low noise single channel applications (Life Science measurements) or higher speed multiplexed applications (Factory Automation PLC Input modules). This page gives an overview of using the AD717x/AD411x firmware example with SDP-K1 EVAL board, interfacing with various EVAL boards supporting AD711x/AD411x family devices. The firmware example comprises 3 layers of software (from top to bottom): Console Application Layer, Device No-OS Layer and Platform Drivers layer. It supports STM32 platform.
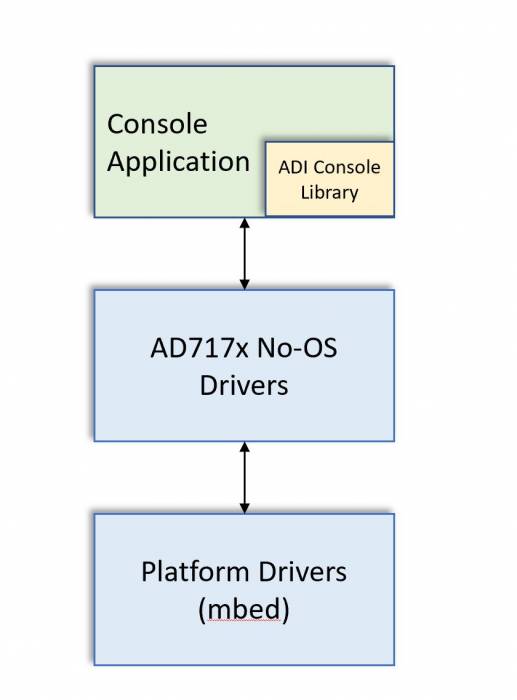
The application layer uses the ADI Console Libraries to create console based User Interactive (UI). The middle layer of No-OS device library have device specific APIs to interface with AD717x/AD411x device. These APIs allows direct access to device register map in order to read/write device registers. The bottom layer of Platform Drivers is responsible for Low Level Interface. The platform drivers uses underlying libraries to access low level peripheral (like GPIOs, SPI, I2C, etc).
The Platform simplifies the overall software development process by providing the low level driver support. This reduces the hardware dependency as any STM32 board can be used with same firmware with little modifications (precisely changing a pin mapping).
Interface Diagram
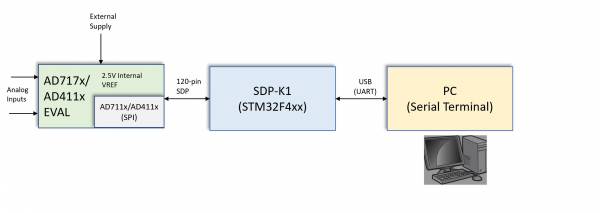
The EVAL-AD411x/EVAL-AD717x board is connected to SDP-K1 through on-board default 120-pin SDP Connector. The AD717x/AD411x EVAL boards can be powered-up through a SDP-K1 USB supply or from external DC supply, depending on the power supply jumper settings. The settings can vary board to board and user must refer user manual of respective EVAL board for ensuring the proper connections. The SDP-K1 is connected to PC through an USB cable. The firmware (binary executable) can be loaded into SDP-K1 board through this USB interface from the PC. The SDP-K1 acts as a Serial Device (UART) and firmware loaded into it interacts with any serial terminal (like Teraterm, Putty, Coolterm, etc) by configuring terminal for proper serial settings (COM Port, Baud Rate, data bits, etc).
Note
The firmware provides a basic user-interface for interacting with the evaluation-board. All the main functionality of the AD411x/AD711x is provided in the application-code in abstracted form and the user is free to customize the software to suit their own needs for working with the AD711x/AD411x.
Useful Links
Note
Linux and HDL are not used in emebdded IIO firmware projects but they may be of interest if you require Linux and/or FPGA support.
Hardware Connections

Power Supply and USB Connection
SDP-K1- Connect the VIO_ADJUST jumper on the SDP-K1 board to 3.3V position to drive SDP-K1 GPIOs at 3.3V
EVAL-AD4111SDZ Board (AD4111/AD4112 chip)- Connect PWR (LK3) connector to USB_SUPP (B) position to power-up device from the SDP-K1 USB.
Note
The settings can vary board to board and user must refer user manual of respective EVAL board for ensuring the proper connections.
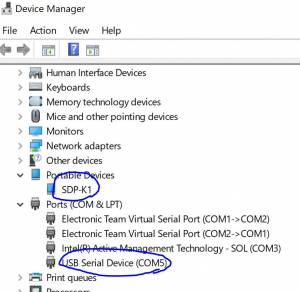
SDP-K1 is powered through USB connection from the PC. SDP-K1 acts as a Serial device when connected to PC, which creates a COM Port to connect to Serial Terminals like Teraterm, Putty, etc. The COM port assigned to a device can be seen through the device manager for windows based OS.
AD717x Firmware
This section briefs on the usage of firmware. This also explains the steps to compile and build the application using STM32CubeIDE.
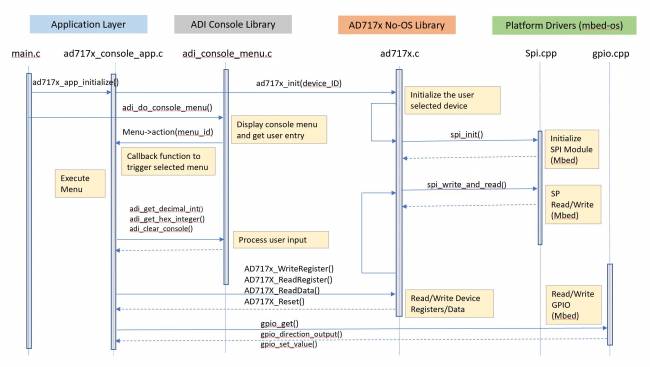
The software execution sequence for the AD717x/AD411x Firmware Example is shown below. This is a blocking application as it waits for user input over serial interface (UART). The input is scanned and processed through ‘adi console libraries’. The menu functionality is executed from ad717x_conole_app.c file. The application layer talks with No-OS layer for device registers and data access. The No-OS layer interfaces with Platform Drivers layer for accessing low level peripherals. As name suggests, this layer is platform dependent. AD717x/AD411x firmware uses underlying libraries within Platform Drivers layer.
Build Guide
Build Prerequisites
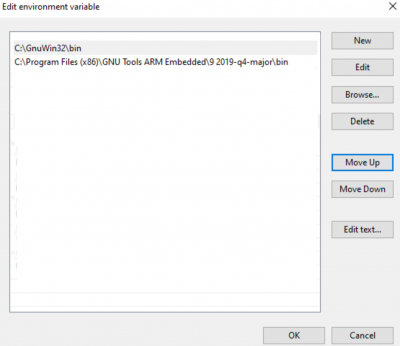
Prior to building a firmware project, it is required to set up an environment so that the build process may find the necessary tools (compiler, linker, SDK etc.). Use the following steps to prepare your environment for building firmware projects for respective platform.
Clone Precision Converters Firmware repository with the –recursive flag:
git clone --recursive https://github.com/analogdevicesinc/precision-converters-firmware
If however you’ve already cloned the repository without the –recursive flag, you may initialize all the submodules in an existing cloned repo with:
git submodule update --recursive --init
Install STM32CubeIDE
Install STM32CubeMX
Building a project
Once the build enviornment is setup, follow the guide below to build your project and generate executable file (.bin/.hex)
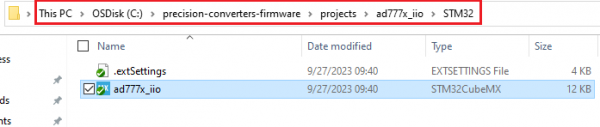
Open the respective project directory by navigating into the “precision_converters_firmware/projects/” folder.
In the “STM32” folder present within the project directory, double click and open the .ioc file present within.
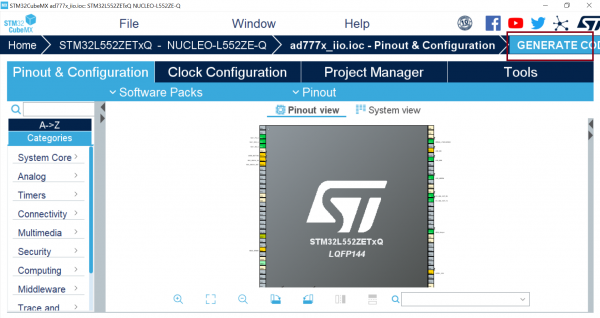
Click on the “Generate Code” option seen on the top right corner
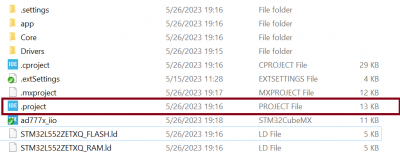
Upon successful generation of drivers for the selected MCU, the autogenerated files would be seen in the same directory where the .ioc file was present. Double click and open the “.project” file seen in the list of files
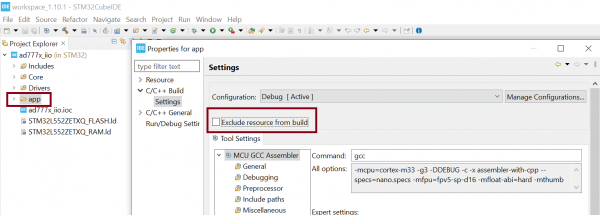
After the project is loaded to the STM32CubeIDE, unfold the adxxxx_iio project seen in the project explorer, right click the “app” folder, select “Settings” under the “C/C++ Build” section on the left pane and un-check the “Exclude resources from build” checkbox. This would ensure that the project specific files are included by the build system
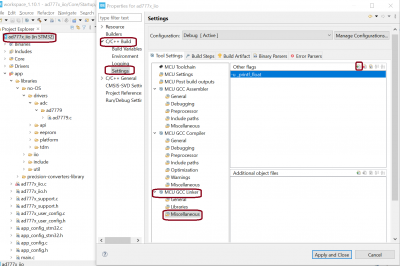
Add compiler flags “-u _printf_float” to the project settings.
Exclude the generated file syscalls.c from the build process

- To generate the binary file, right click on the adxxxx_iio project seen in the project explorer and select “Properties”, select “Settings” under the “C/C++ Build” section on the left pane, select “MCU Post build outputs” under “Tool Settings” section and check the “Convert to binary file (-O binary)” checkbox.

Build the project by right-clicking on the adxxxx_iio project seen in the project explorer and select “Build Project”

Running a project
Once the firmware build is successful and binary file is generated, copy the generated binary into USB drive hosted by your MCU board (e.g. USB drive hosted by MCU board on windows). This will flash the binary file into MCU present on the controller board. Programming might vary based on the tools used for building a project. The ‘Project Build’ section above talks about this exception at the end of all build steps.
Quick Start
If you have some familiarity with the STM32 platform, the following is a basic list of steps required to start running the code, see below for more detail:
Connect the AD717x/AD411x EVAL-board to the SDP-K1 controller board.
Connect the SDP-K1 controller board to your computer over USB.
Follow the steps mentioned in the Build Guide section above.
- Start up a serial terminal emulator (e.g. Tera Term)
Find the com-port your controller board is connected on and select it.
Set the baud-rate for 230400
Reset the controller board and connect.
Use the menu provided over the terminal window to access the evaluation board.
Using the Firmware
The AD711x/AD411x firmware example is configured to have following serial settings:
Baud rate: 230400 Data bits: 8-bits Parity: None Stop bits: 1
Configure your serial terminal (Tera Term) for below settings:
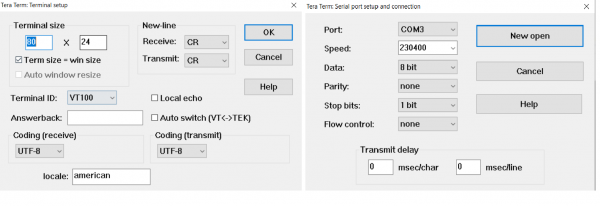
The AD717x/AD411x console main menu looks like below (with Tera Term):
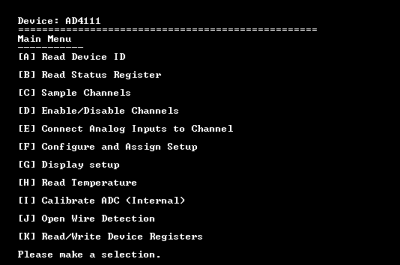
The firmware is designed to be intuitive to use, and requires little explanation, simply enter a number corresponding to the required command and follow the on-screen prompts.
The firmware comes with an app_config.h file which (at the moment) serves two purposes. * Select the active device to test. * Configure the pins you want to use to connect the controller board to the evaluation board.
The firmware supports most products in AD717x/AD411x family, change the #define DEV_ADxxxx found in app_config.h to suit your selected device. e.g. #define DEV_AD7111_2 executes the AD7112-2 device functionality.
Support
Feel free to ask questions in the EngineerZone