AD4130 IIO Application
Supported Hardware
Supported Devices:
Supported Evaluation Boards:
Supported Carrier Boards:
Introduction
This guide gives an overview of using the IIO firmware application with Analog Devices AD4130 Evaluation board and SDP-K1 (or other compatible) MCU controller board, leveraging STM32 as a primary software platform. This firmware application leverages the ADI developed IIO (Industrial Input Output) ecosystem to evaluate the AD4130 (IIO) device by providing device configuration and data capture support.
The interface used for communicating with PC based IIO clients is either Virtual Serial Or UART. IIO Firmware leverages the ADI created no-os and platform driver software layers to communicates with IIO device.
Useful Links
Note
Linux and HDL are not used in emebdded IIO firmware projects but they may be of interest if you require Linux and/or FPGA support.
Hardware Connections
Jumper Settings
SDP-K1:
Connect the VIO_ADJUST jumper on the SDP-K1 board to 3.3V position to drive SDP-K1 GPIOs at 3.3V
EVAL-AD4130 (Rev D):
Note
Below jumper settings of AD4130 EVB are specific to sensor demo modes supported in the firmware. Change the jumper settings according to your requirements/demo configurations.
Communication Interface
Note
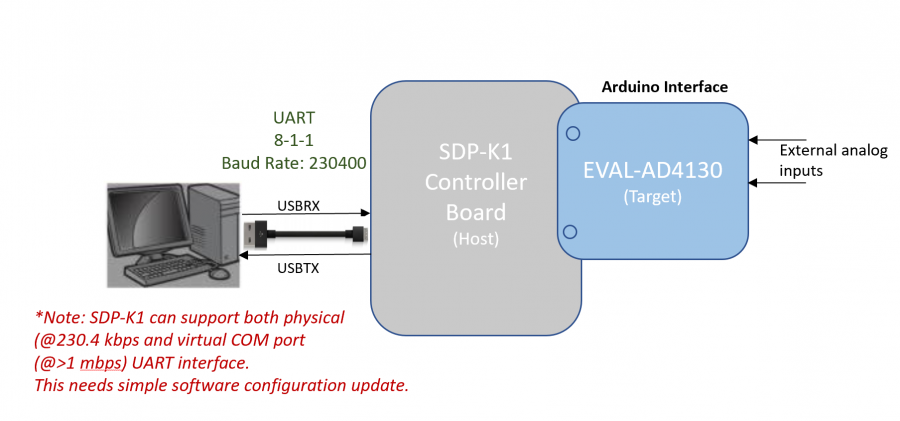
For data transmission to IIO clients, IIO firmware applications uses Virtual Serial Or UART as primary communication links. Firmware by default uses the Virtual Serial interface for SDP-K1 for higher speed data transmission as SDP-K1 board supports both Virtual Serial and UART interface. The Nucleo-H563 supports only UART. If you target a different MCU board that does not support Virtual Serial, just set UART as communication link in the firmware (app_config.h file).
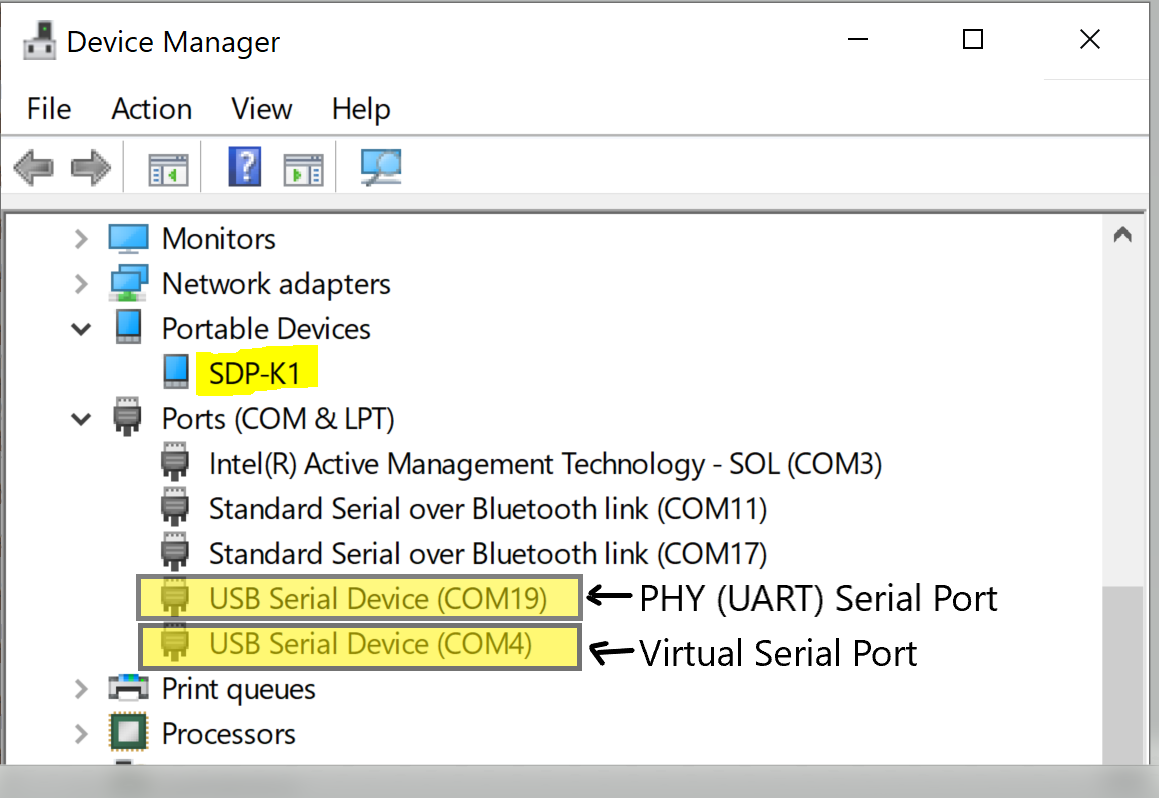
MCU board is powered through USB connection from the computer. It acts as a serial device when connected to PC, which creates a serial ports to connect to IIO client application running on PC. The serial port assigned to a device can be seen through the device manager for windows-based OS as shown below:
Note
The serial port naming is used differently on different operating systems. For example, Linux uses terms such as dev/ttyUSB* and Mac uses terms such as dev/tty.USB*. Please check serial port naming for your selected OS.
Identifying Virtual Serial Port (Windows-OS):
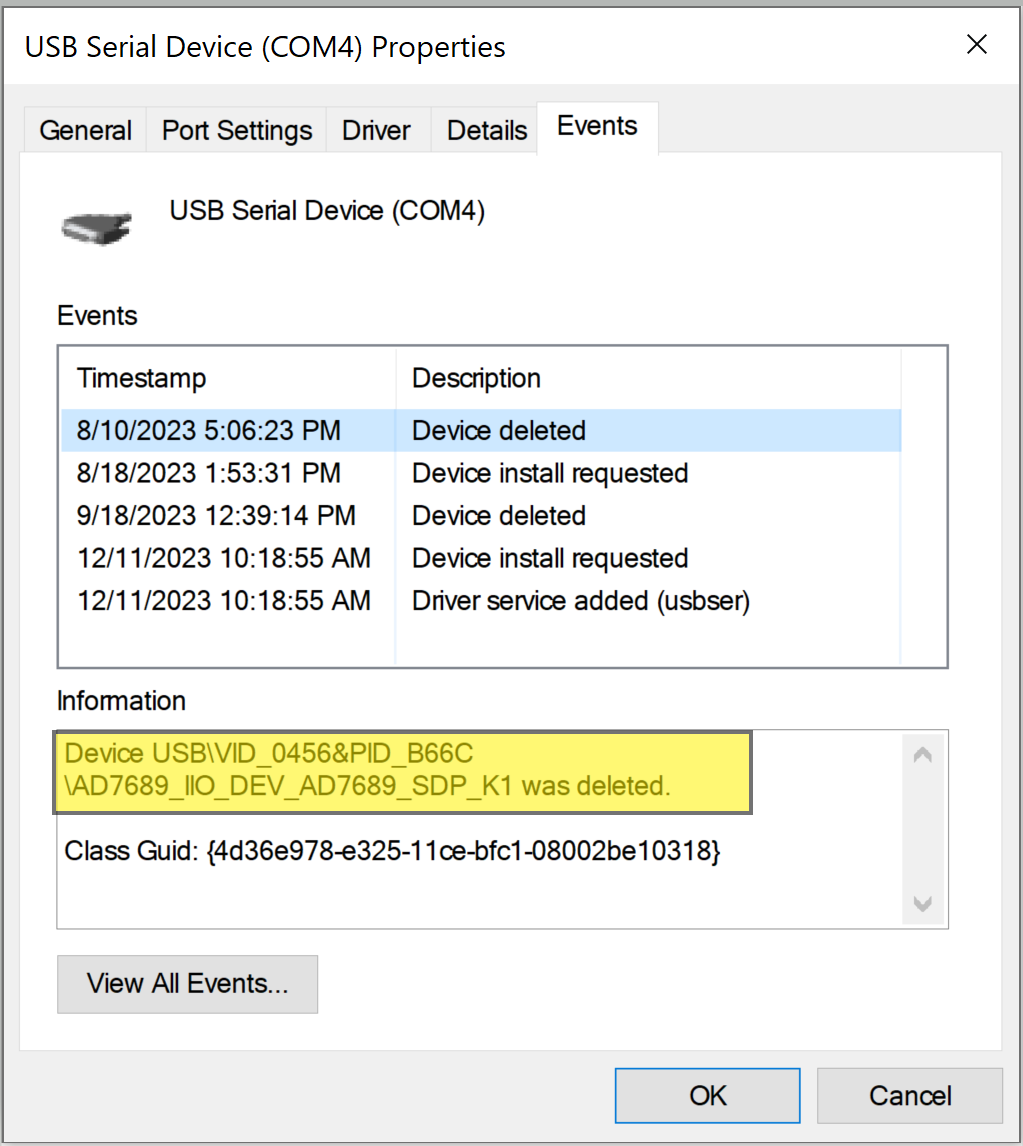
To identify if serial port is virtual, right click on the port name and select ‘Properties’. Select ‘Events’ from menu option and check for below highlighted VIDs/PIDs and firmware name which is currently running on MCU.
SDP-K1 can support high speed Virtual Serial USB interface, so by default Virtual Serial is configured as default interface. The interface can be set to Physical (UART) serial port by defining macro USE_PHY_COM_PORT in the app_config.h file.
Nucleo-H563 supports only UART interface, so by default Physical (UART) serial port is configured as default interface.
/* Enable the UART/VirtualCOM port connection (default VCOM) */
//#define USE_PHY_COM_PORT // Uncomment to select UART
Build Guide
Build Prerequisites
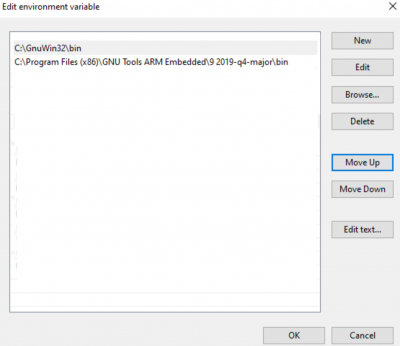
Prior to building a firmware project, it is required to set up an environment so that the build process may find the necessary tools (compiler, linker, SDK etc.). Use the following steps to prepare your environment for building firmware projects for respective platform.
Clone Precision Converters Firmware repository with the –recursive flag:
git clone --recursive https://github.com/analogdevicesinc/precision-converters-firmware
If however you’ve already cloned the repository without the –recursive flag, you may initialize all the submodules in an existing cloned repo with:
git submodule update --recursive --init
Install STM32CubeIDE
Install STM32CubeMX
Building a project
Once the build enviornment is setup, follow the guide below to build your project and generate executable file (.bin/.hex)
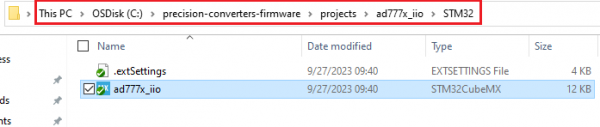
Open the respective project directory by navigating into the “precision_converters_firmware/projects/” folder.
In the “STM32” folder present within the project directory, double click and open the .ioc file present within.
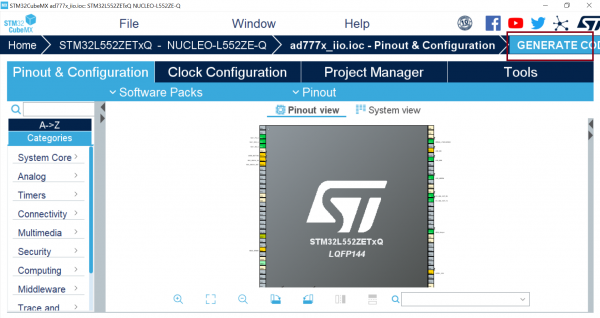
Click on the “Generate Code” option seen on the top right corner
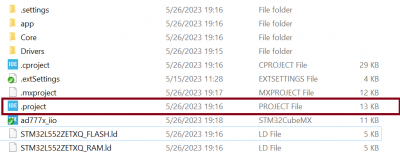
Upon successful generation of drivers for the selected MCU, the autogenerated files would be seen in the same directory where the .ioc file was present. Double click and open the “.project” file seen in the list of files
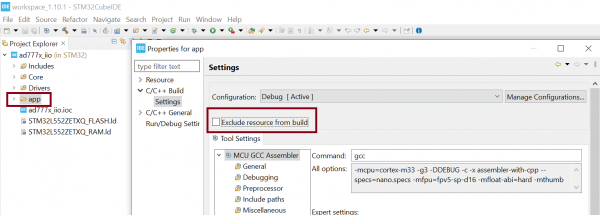
After the project is loaded to the STM32CubeIDE, unfold the adxxxx_iio project seen in the project explorer, right click the “app” folder, select “Settings” under the “C/C++ Build” section on the left pane and un-check the “Exclude resources from build” checkbox. This would ensure that the project specific files are included by the build system
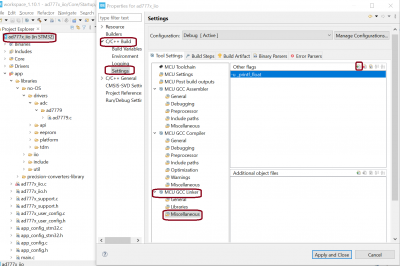
Add compiler flags “-u _printf_float” to the project settings.
Exclude the generated file syscalls.c from the build process

- To generate the binary file, right click on the adxxxx_iio project seen in the project explorer and select “Properties”, select “Settings” under the “C/C++ Build” section on the left pane, select “MCU Post build outputs” under “Tool Settings” section and check the “Convert to binary file (-O binary)” checkbox.

Build the project by right-clicking on the adxxxx_iio project seen in the project explorer and select “Build Project”

Running a project
Once the firmware build is successful and binary file is generated, copy the generated binary into USB drive hosted by your MCU board (e.g. USB drive hosted by MCU board on windows). This will flash the binary file into MCU present on the controller board. Programming might vary based on the tools used for building a project. The ‘Project Build’ section above talks about this exception at the end of all build steps.
Using the IIO Ecosystem
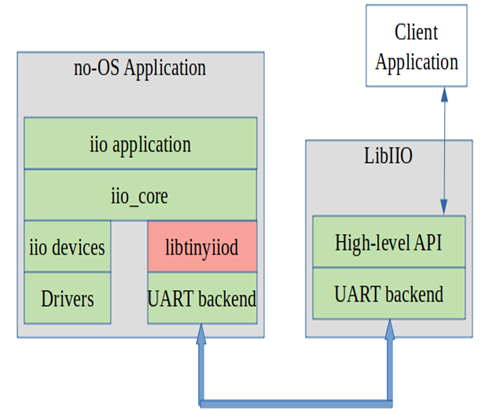
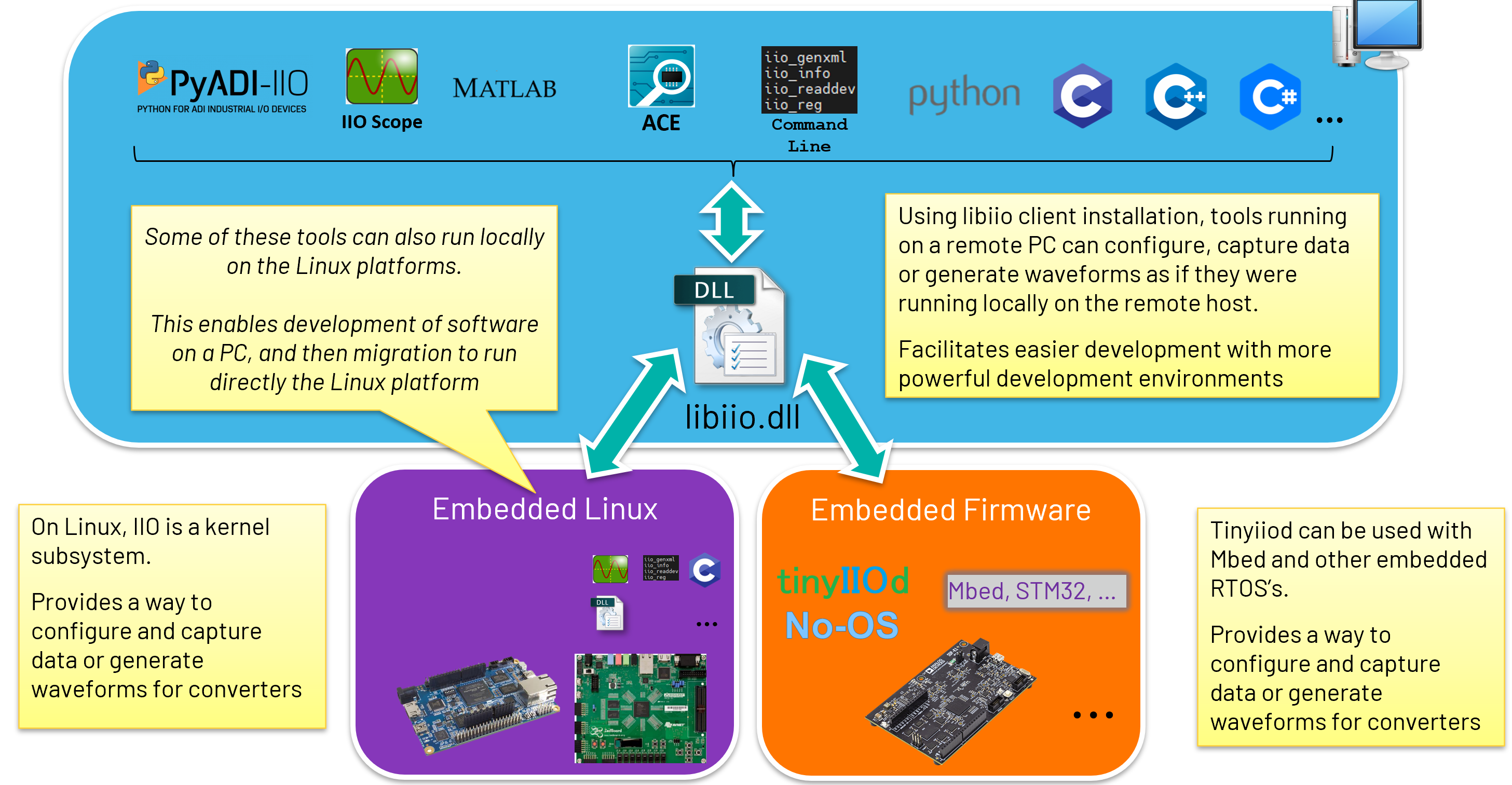
IIO (Industrial Input/Output) is a flexible ecosystem that allows various client tools to communicate with IIO device to configure the device, capture device data, generate waveforms, access registers, etc. Below diagram demonstrates the high level architecture of IIO ecosystem.
https://wiki.analog.com/resources/tools-software/linux-software/libiio
IIO Tools:
IIO Oscilloscope ADI IIO Oscilloscope is a cross platform GUI application, which demonstrates how to interface different evaluation boards within an IIO ecosystem. It supports raw data capture, FFT analysis, DMM measurement, device configuration, register read/write and data streaming.
pyadi-iio: Python interfaces Analog Devices python interfaces for hardware with Industrial I/O drivers. It provides python based scripts for raw data capture, device configuration and register read/write.
ACE ADI’s “Analysis, Control, Evaluation” (ACE) is a desktop software application which allows the evaluation and control of multiple evaluation systems.
Precision Converters MATLAB Toolbox Toolbox created by ADI to be used with MATLAB and Simulink with ADI Precision products.
IIO Command Line Command line interface for accessing IIO device parameters.
Pocketlab ADI Pocketlab is a display based GUI client. It supports raw data capture, FFT analysis, DMM measurement, device configuration, register read/write.
Note
These are the general evaluation and prototyping tools for Precision Converters but not all converters are supported. In some cases these tools provide generic IIO support (e.g. ACE, IIO Oscilloscope) and can provide basic functionality with any IIO based system. In other cases if a part is not currently supported, it is possible to add support for converters that you need due to the open source nature of the tools.
AD4130 Sensor Demo Modes
AD4130 IIO firmware provides support for interfacing different sensors to analog inputs and perform the measurement on them. Below sensor demo modes are supported in the firmware.
User Default Config (All channels test)
2-wire/3-wire/4-wire RTD (Default is PT100)
Thermistor (Default is 10K NTC)
Thermocouple (Default is T type TC and PT1000 RTD as CJC)
Load Cell (4-wire bridge)
Noise Test (AIN0-AIN1 shorted)
ECG
Power Test (ADC internal channels voltage/current measurement)
Note
The demo mode configurations can be changed from respective user_config header files and some sensor specific parameters can be updated from ad4130_temperature_sensor.cpp file.
Demo Mode Selection
The sensor mode selection is done from “app_config.h” file using “ACTIVE_DEMO_MODE_CONFIG” macro. The selection is done at compilation time, that means only one sensor demo mode is active at a time. Whenever demo mode is changed from app_config.h file, the code must be compiled again to generate a new binary file for that.
Demo Mode User Configuration
Firmware maintains the unique user configuration file for each sensor demo mode as per below table. The configurations can be updated by using .c and .h user config files.
Demo Mode |
User Config Files |
||
2-wire/3-wire/4-wire RTD |
ad4130_rtd_config.c/.h |
||
Thermistor |
ad4130_thermistor_config.c/.h |
||
Thermocouple |
ad4130_thermocouple_config.c/.h |
||
Load Cell |
ad4130_loadcell_config.c/.h |
||
Noise Test |
ad4130_noise_test_config.c/.h |
||
ECG |
ad4130_ecg_config.c/.h |
||
Power Test |
ad4130_power_test_config.c/.h |
||
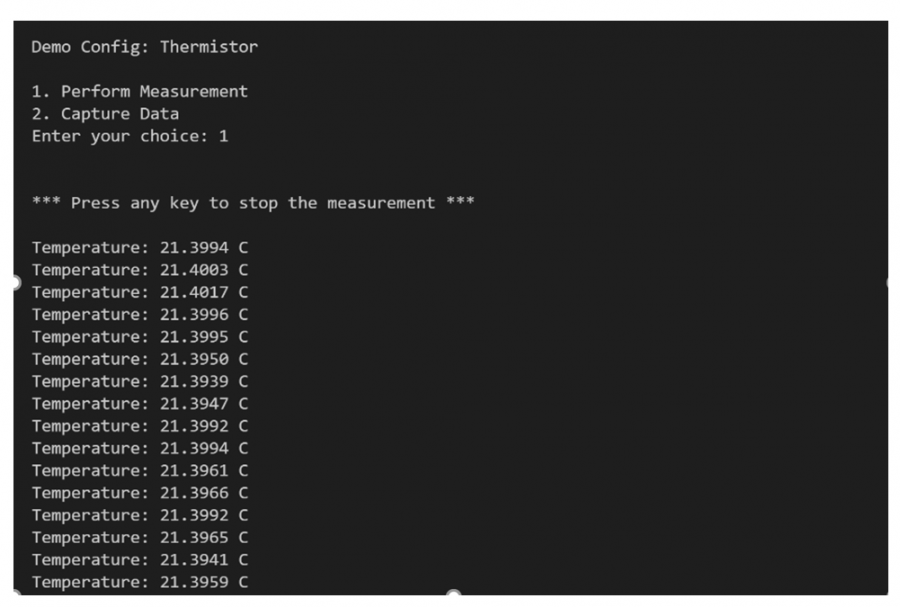
Sensor Measurement
Sensor measurement for RTD, Thermistor, Thermocouple, Noise Test, ECG, Power Test and User Default Config can be done using the IIO oscilloscope GUI client application or by executing python scripts from the ‘scripts’ folder. Temperature result for RTD, TC and Thermistor would be in degree Celsius. The result for other configs would in voltage/current.
Refer to this guide here to setup IIO enviornment for sensor measurements if not already done: Setting-up IIO Ecosystem
Sensor measurement for Load Cell can be done by executing the python script available in the project “scripts” folder. IIO oscilloscope can only support measurement for voltage, current and temperature quantities and therefore python code is developed to support measurement for other sensor types.
$ python ad4130_sensor_measurement.py
Sensor Channels Calibration
It is possible to calibrate the device channels which are connected to external sensors. The sensors calibration (gain and offset) is done by executing the python script “ad4130_calibration.py”.
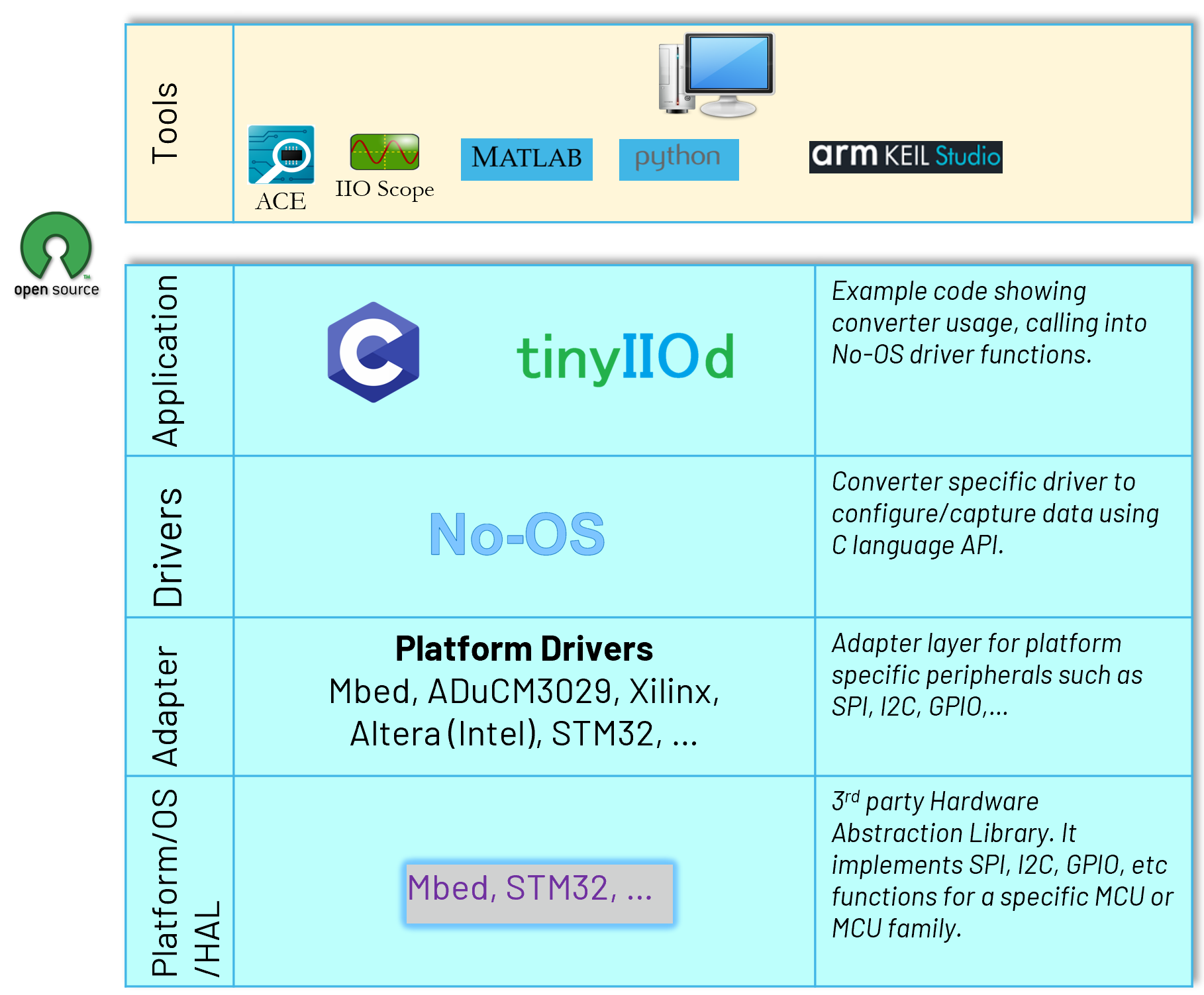
IIO Firmware Structure
Below diagram illustrates the architecture of Precision Converters IIO firmware applications.
Support
Feel free to ask questions in the EngineerZone