ADT7420 Console Application
Supported Hardware
Supported Devices:
Supported Evaluation Boards:
Supported Carrier Boards:
Introduction
The ADT74XX and ADT73XX are a family of high accuracy digital temperature sensors offering breakthrough performance over a wide industrial range. The EV-Tempsense-ARDZ Mbed support software can be used as a starting point for developing your own code for Analog Devices EV-TempSense-ARDZ board in your own environment utilizing the benefits of the Mbed platform. Analog Devices is an MBED Partner and develops code on the platform for multiple products. The firmware example comprises 3 layers of software (from top to bottom): Console Application Layer, Device No-OS Layer and Platform Drivers (Mbed-OS) layer.
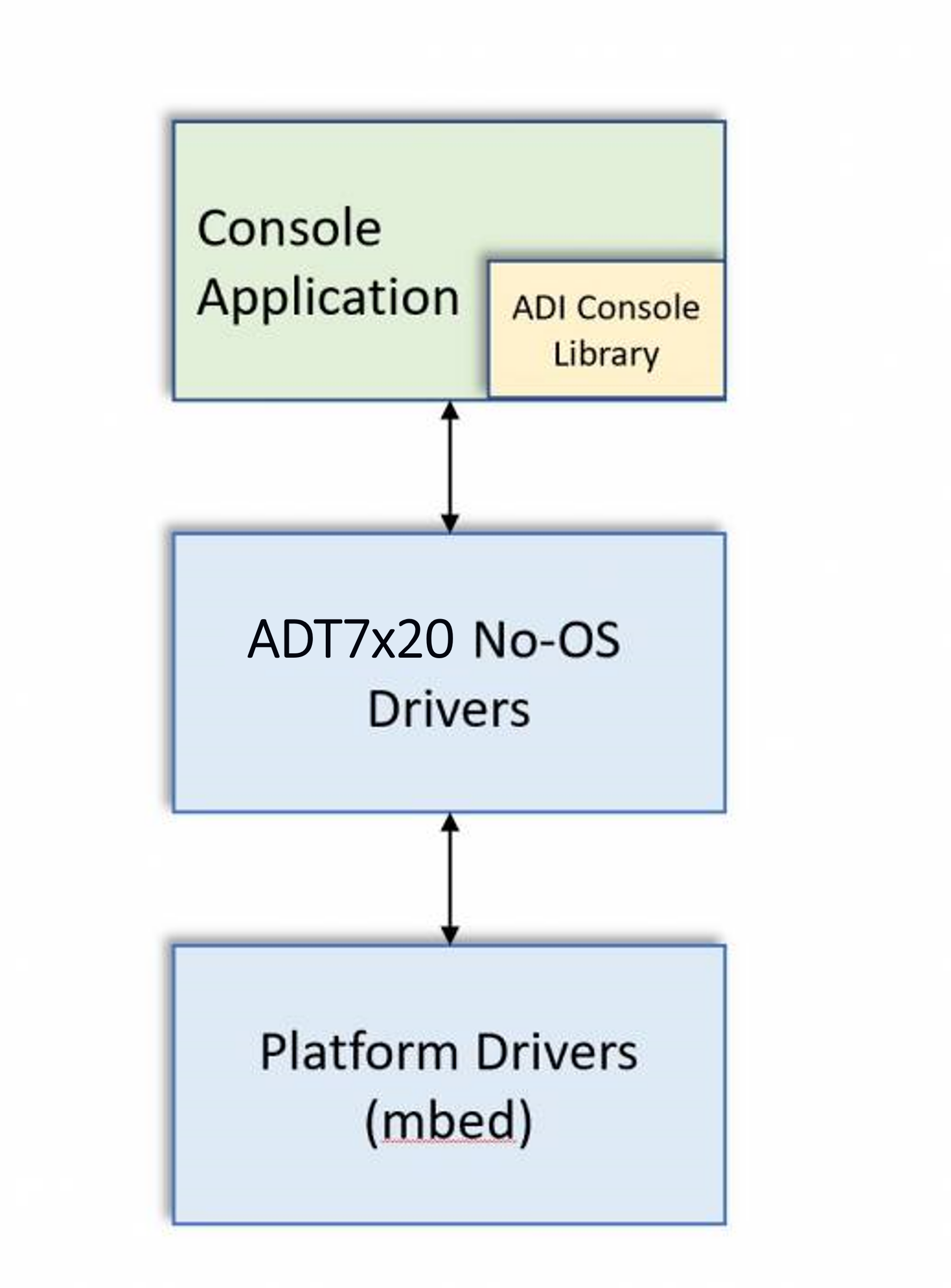
The application layer uses the ADI Console Libraries to create console-based User Interactive (UI). The middle layer of No-OS device library has device specific APIs to interface with ADT7420/ADT7320 devices. These APIs allows direct access to device register map in order to read/write device registers. The bottom layer of Platform Drivers is responsible for Low Level Interface. The platform drivers use mbed-os libraries to access low level peripheral (like GPIOs, SPI, I2C, etc). The devices from ADT74XX and ADT73XX family use I2C and SPI communication interfaces.
This guide will focus on the Analog Devices SDP-K1 controller board, as it is directly compatible with the TempSense evaluation board and is an MBED-Enabled device. Customers are of course, not limited to using the SDP-K1 board for code development, given that any ARM-based, MBED-enabled board that satisfies a small set of requirements can use the provided code and it will work with only minor changes to the source (see below).
It is further assumed that SDP-K1 board will be connected to the appropriate ADT74XX/ADT73XX eval-board such as the EV-TempSense-ARDZ Evaluation board which has the ADT7320 (SPI) and ADT7420 (I2C) built in with the ability to connect external sensor via headers on the board.
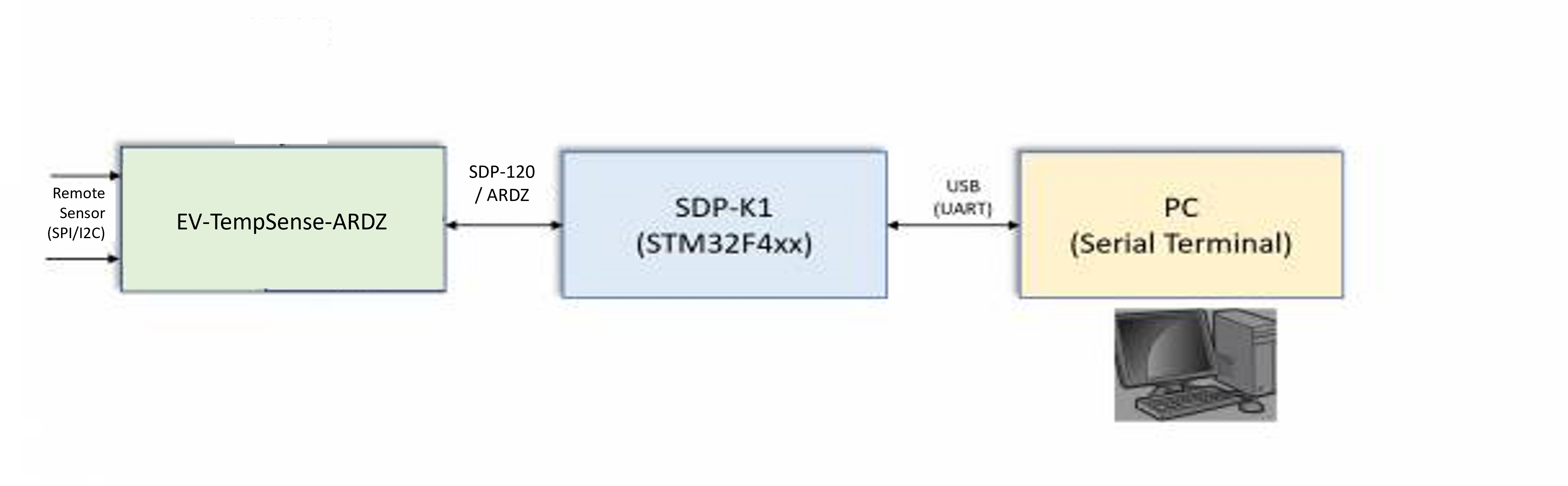
Interface Diagram
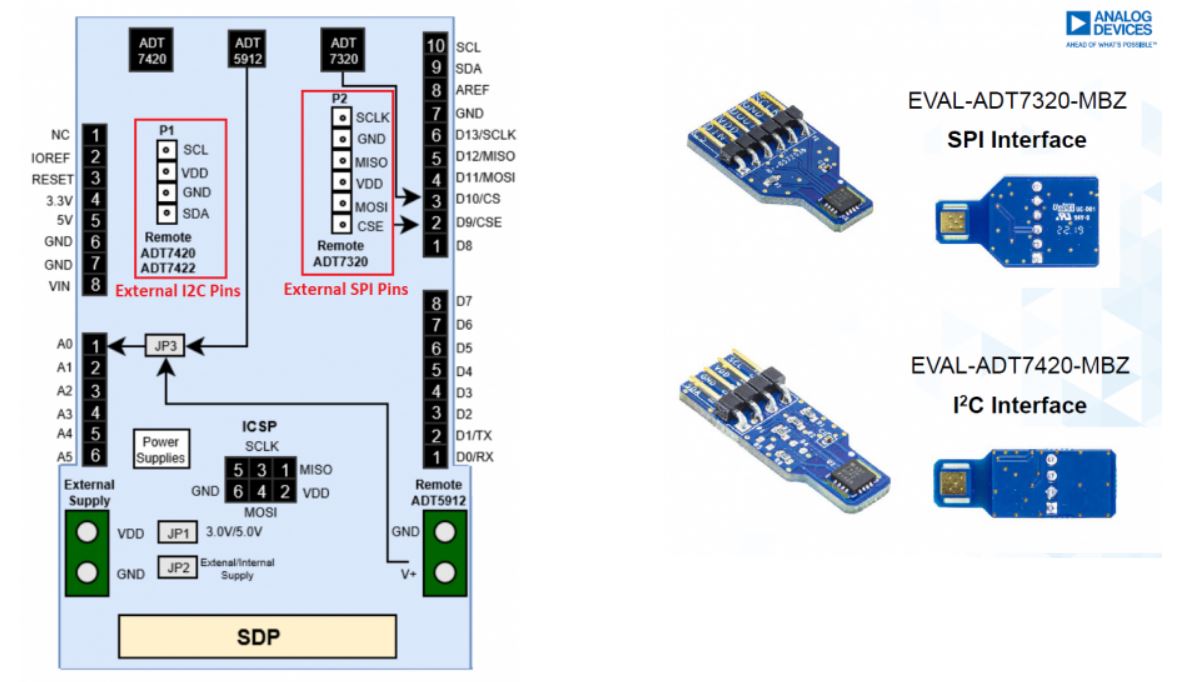
The EV-TempSense-ARDZ board supports remote ADT74XX and ADT73XX devices. These can be connected to pins at the top of the eval board using ribbon cables or jumper wires, these pins are marked in the image below. SPI devices (EVAL-ADT7320-MBZ) and I2C devices (EV-ADT7420-MBZ) connect to their respective header pins by matching the pins on the board to those labelled on the remote board.
Useful Links
Note
Linux and HDL are not used in emebdded IIO firmware projects but they may be of interest if you require Linux and/or FPGA support.
Hardware Connections
Connecting the EV-TempSense evaluation board using the SDP connector on the K1 is the simplest and most convenient way to get up and running quickly, simply mate the two boards to together.
Note
If using the Arduino header pins, compile the software only after uncommenting the #define ARDUINO in app_config.h
The EV-TempSense-ARDZ can be connected to the SDP-K1 by stacking the EV-TempSense-ARDZ ARDZ pins on top of the SDP-K1’s Arduino header.
Build Guide
Build Prerequisites
Prior to building a firmware project, it is required to set up an environment so that the build process may find the necessary tools (compiler, linker, SDK etc.). Use the following steps to prepare your environment for building firmware projects for respective platform.
Visit Arm Keil website to create an user account for accessing the web based Keil Studio IDE.
Open Keil Studio Web IDE with registered user account
Clone Precision Converters Firmware repository with the –recursive flag (not needed if building with web IDE for Mbed platform):
git clone --recursive https://github.com/analogdevicesinc/precision-converters-firmware
If however you’ve already cloned the repository without the –recursive flag, you may initialize all the submodules in an existing cloned repo with:
git submodule update --recursive --init
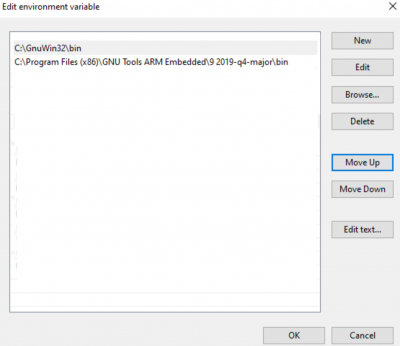
Install Make in the root of ‘C’ drive without any spaces in the installation path. The path must be C:\GnuWin32\…. Add this path into the system environmental path variable (as shown in below screenshot).
Install Git and add a path of C:\Program Files\Git\usr\bin\ directory into system environmental path variable (please verify your git installation path is correct).
Install Mbed CLI 1 as per guide here.
Install GNU Arm Embedded compiler (for the development, 9-2019-q4-major version is used) and add a path of GNU Arm Embedded Toolchain bin directory into the system environmental path variable (as shown in below screenshot).
Configure the compiler location with Mbed CLI. This can be carried out by running the mbed config -G GCC_ARM_PATH <path-to-your-gcc-compiler> in Command Prompt. For example you can run mbed config -G GCC_ARM_PATH “C:\Program Files (x86)\GNU Tools ARM Embedded\9 2019-q4-major\bin” in command prompt. It will set mentioned compiler path to all the Mbed Projects.
Install STM32CubeIDE
Install STM32CubeMX
Building a project
Once the build enviornment is setup, follow the guide below to build your project and generate executable file (.bin/.hex)
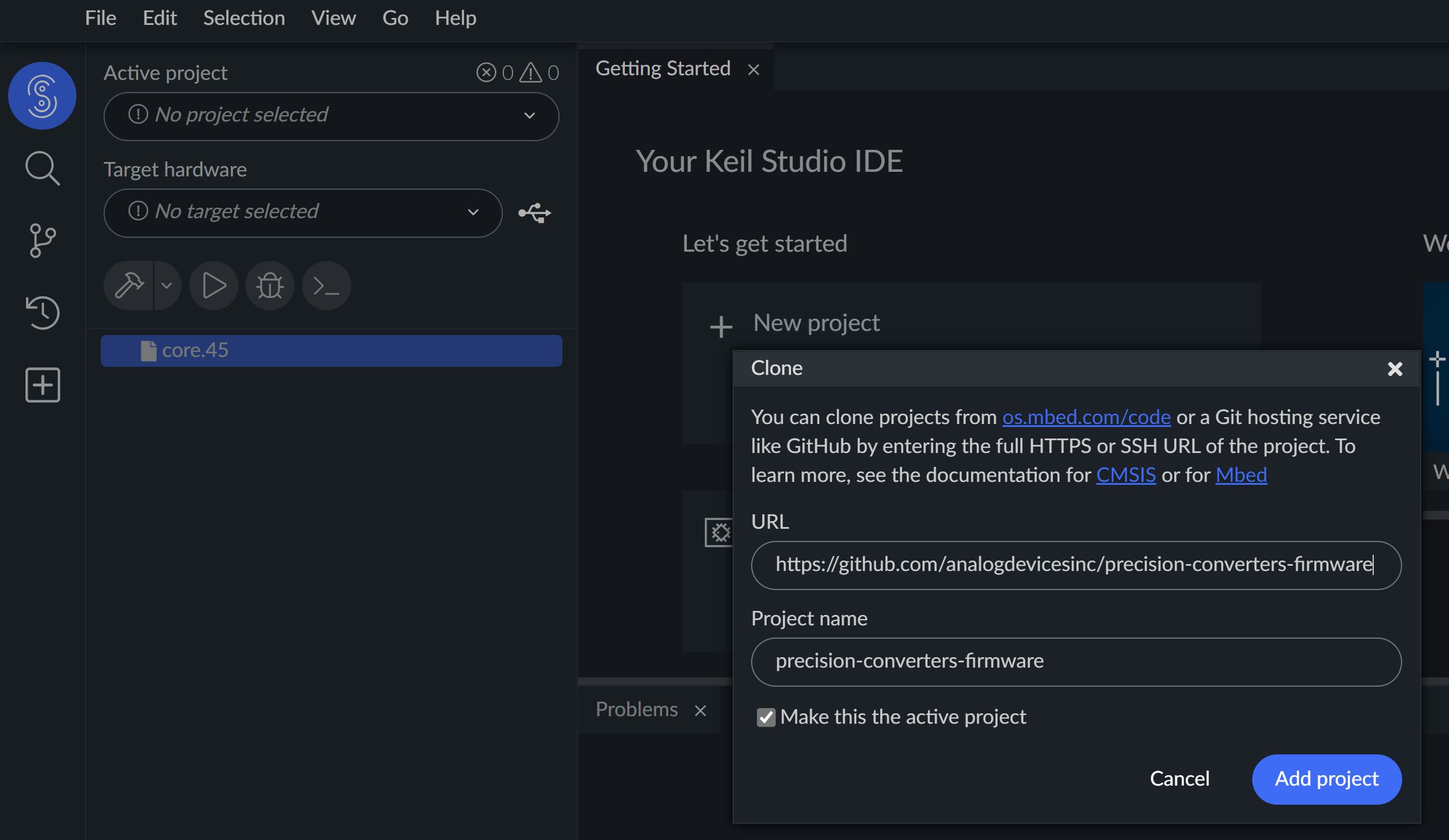
Clone the Precision Converters Firmware repository into Keil Studio using “File->clone…” menu.
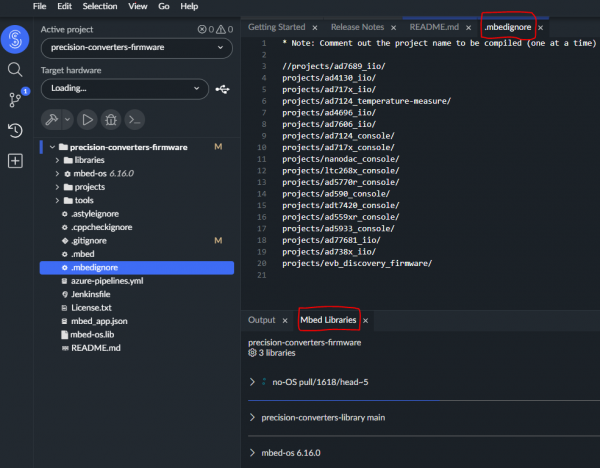
Once the project repository is imported, wait until all library dependencies are imported as shown in below screenshot. Now, open the ‘.medignore’ file present in the root directory of repository. Add comment syntax (two forward slashes) in front of the project name which you want to build. This will ignore all other projects and build only the comment syntax selected project.
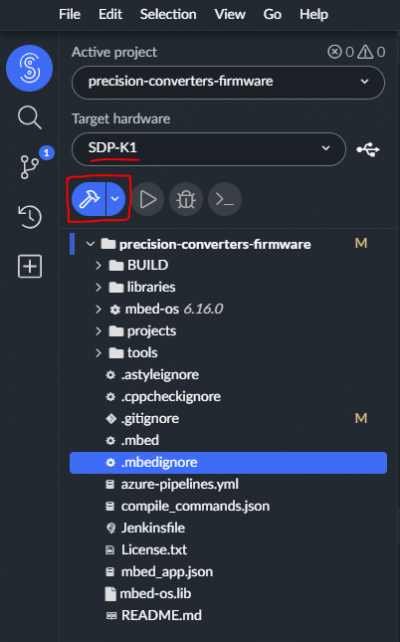
Select the target device (default used for development is SDP-K1) and click on ‘Clean build’ option to build the project. After a successful build a binary will be downloaded to your computer- store this on your drive. Drag and drop this binary to the USB drive hosted by your controller board to flash the MCU.
Note
If you intend to build different project, then modify the .medignore file in the root directory as mentioned in step2 and clean build project as mentioned in step3
Open Git bash and change current directory to project directory (eg. precision-converters-firmware/projects/ad4130_iio directory) which you want to build.
Type make on the git bash command prompt to build a project.
After successful build, binary file will be created into the Project_Name/build directory.
If you want to clean build, type make reset on git bash command which deletes all generated build files for the given project.
Note
Default TARGET_BOARD is SDP_K1 and COMPILER is GCC_ARM. Current Make based build only support GCC_ARM Compiler.
By default project is built for “SDP_K1” Board and “GCC_ARM” Compiler. If you want to build for other Mbed Board, For example If you want to build the project for “DISCO_F769NI” Board then run make TARGET_BOARD=DISCO_F769NI command in git bash command prompt. If you want to clean build, run make reset TARGET_BOARD=DISCO_F769NI command to delete the generated build files for the given project.
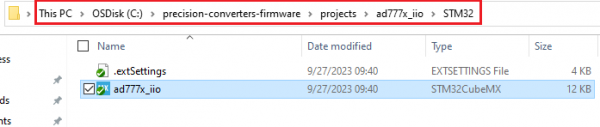
Open the respective project directory by navigating into the “precision_converters_firmware/projects/” folder.
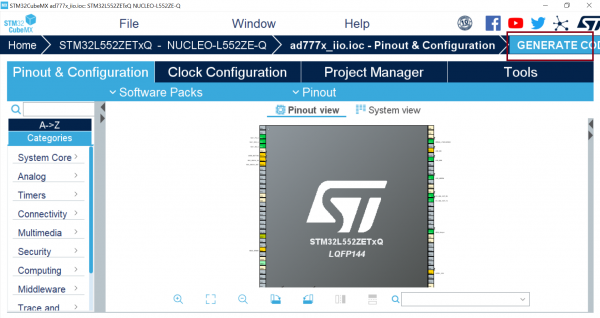
In the “STM32” folder present within the project directory, double click and open the .ioc file present within.
Click on the “Generate Code” option seen on the top right corner
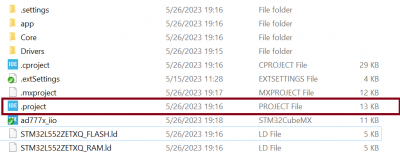
Upon successful generation of drivers for the selected MCU, the autogenerated files would be seen in the same directory where the .ioc file was present. Double click and open the “.project” file seen in the list of files
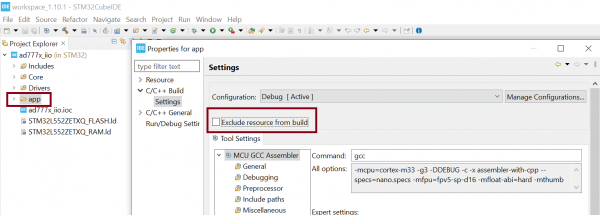
After the project is loaded to the STM32CubeIDE, unfold the adxxxx_iio project seen in the project explorer, right click the “app” folder, select “Settings” under the “C/C++ Build” section on the left pane and un-check the “Exclude resources from build” checkbox. This would ensure that the project specific files are included by the build system
In order to choose STM32 platform in the firmware, select the “ACTIVE_PLATFORM” as “STM32_PLATFORM” in the app_config.h from the respective project. Alternately , add compiler flag “ACTIVE_PLATFORM=value of STM32_PLATFORM in app_config.h” for selecting stm32 platform.
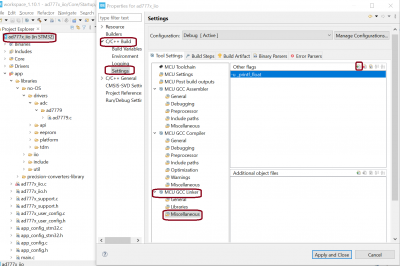
Add compiler flags “-u _printf_float” to the project settings.
Exclude the generated file syscalls.c from the build process

Program by clicking on the “Run adxxxx_iio” option seen or by performing a copy->paste option of the .hex file seen in the STM32/Debug folder

Running a project
Once the firmware build is successful and binary file is generated, copy the generated binary into USB drive hosted by your MCU board (e.g. USB drive hosted by the supported MCU board on windows). This will flash the binary file into MCU present on the controller board. Programming might vary based on the tools used for building a project. The ‘Project Build’ section above talks about this exception at the end of all build steps.
Quick Start
If you have some familiarity with the Mbed platform, the following is a basic list of steps required to start running the code, see below for more detail:
Connect the evaluation-board to the Mbed-enabled controller board using the Arduino connector or using the SDP-120 connector.
Connect the controller board to your computer over USB. (Make sure that the VIO_ADJUST is set to 3.3 volts)
Follow the steps mentioned in the Build Guide section above.
- Start up a serial terminal emulator (e.g. Tera Term)
Find the com-port your controller board is connected on and select it.
Set the baud-rate for 230400 - other defaults should be fine.
Reset the controller board and connect.
Use the menu provided over the terminal window to access the evaluation board.
Using the Firmware
The firmware is delivered as a basic, text-based user-interface that operates through a UART on the controller board using the same USB cable that is used to flash the firmware to the boards. Any terminal-emulator should work, but it is not possible for Analog Devices to test everyone. It is necessary to connect a serial terminal-emulator to interact with the running firmware.
Here CoolTerm is used as an example, Analog Devices does not endorse any particular program for this, but CoolTerm works well and is made freely available, other terminals such as TeraTerm, or PuTTY will work.
Set the baud-rate for 115200, configure the console terminal settings as shown in the picture above and select the connected controller board’s COM port. If using CoolTerm, you should be able to keep the defaults, however adjustments may need to be made to how carriage return (CR) is handled in order for everything to display correctly.
The ADT7420 console main menu looks like below (with CoolTerm):
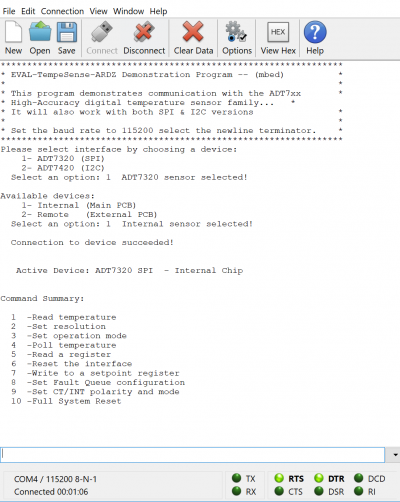
The software is designed to be straight forward to use, and requires little explanation. Simply select which interface (SPI/I2C) you would like to use, whether you want to use the internal sensor or a remote one and then simply enter a number corresponding to the required command and follow the on-screen prompts. The code is also written with a view to keeping things simple, you do not have to be a coding-ninja to understand and expand upon the delivered functions.
Support
Feel free to ask questions in the EngineerZone