ADI DataX Tools for Low Speed Mixed Signal System Design
Note
This is a work in progress.
Introduction
The goal of this tutorial is to equip the reader with a collection of ADI DataX-enabled hardware and software tools for developing low-speed mixed-signal applications. Complete written instructions follow, as well as a video guide and a slide deck that can be used for delivering as a hands-on workshop.
But first - what exactly does “Low Speed” mean? In the context of this tutorial, it means that timing is not very critical. Signals are either completely static or moving slowly such that it doesn’t matter if the instant that an ADC samples the signal wiggles around a bit relative to the previous sampling. While clock jitter is one source of this uncertainty, software delays (such as the time between a timer interrupt and the assertion of a “convert” edge) will likely be dominant. Important parameters in low-speed applications are offset, gain error, linearity, and temperature drift. “Noise” in a low-speed application is typically synonymous with resolution, and can be roughly measured by applying a quiet input signal (like a short circuit) and taking a histogram of the output readings. AC performance metrics such as signal to noise ratio and total harmonic distortion extracted from a Fourier transform of the data will not be considered. In contrast - sample jitter is important in a “high speed” application. If you are measuring signal to noise ratio, the Signal to Noise ratio (SNR) can be no greater than:
\(SNR <= -20 * log(2*\pi*f_{IN}*t_{j})\)
Where: \(f_{IN}\) is the analog input frequency in Hz \(t_{j}\) is the RMS jitter in seconds RMS
In this tutorial, we will use a transistor curve tracer as an example application that involves setting voltages and currents, reading voltages and currents, doing some basic math, and displaying a result. Each reading will be treated independently, no correlation to previous or future readings. We will NOT be measuring AC Signal to Noise Ratio (SNR), Total Harmonic Distortion (THD), nor measuring steps, wiggles, or any other situation where precise timing is required. Rest assured, there are lots of very interesting applications in this category; consider a vector network analyzer (VNA) - set an excitation frequency, measure forward and reflected power and phase, do some math, step, repeat, and when done, display the results.
Materials
- Raspberry Pi 4 or 5; 2GB or greater RAM (for Linux examples). (Model 3B, 3B
Plus will work, but you will want a 4 or 5 :-) )
5V USB-C wall adapter for Raspberry Pi (micro USB for model 3)
16GB (or larger) Class 10 (or faster) micro-SD card, with Kuiper installed
- User interface setup (choose one):
HDMI monitor, keyboard, mouse plugged directly into Raspberry Pi
Host Windows/Linux/Mac computer on same network as Raspberry Pi
ADALM2000 (Optional, for observing signals.)
MAX32666FTHR development board (for no-OS examples)
- Either:
ADALM-LSMSPG Low-Speed Mixed Signal Playground module
- Or:
2N3904 NPN Transistor
2N3906 PNP Transistor
47Ω resistor
47kΩ resistor
Breadboard or prototyping board, hookup wire
Clone or download zip of the Python code for this tutorial: ADALM-LSMSPG Pyadi-IIO examples
Note that these are included in the pyadi-iio repo, consider cloning the entire thing:
~$
git clone https://github.com/analogdevicesinc/pyadi-iio.git
AD5592R Device Tree Overlay for alternate configuration with GPIO pins
Background
This tutorial builds on the concepts covered in the Converter Connectivity Tutorial.
It also serves as a preview to the Precision ADC Tutorial that starts to deal with analyzing time series data.
Slide Deck and Video
Since this tutorial is also designed to be presented as a live, hands-on workshop, a slide deck is provided here:
A complete video run-through is also provided, either as a companion to following the tutorial yourself, or to practice before presenting as a hands-on workshop.
Note
This video is accurate, but uses the AD5592 Pmod and discretely built circuit. It will be re-done to target the ADALM-LSMSPG board.
Preparation - a few resources for learning Python
A wonderful resource for learning Python is learnpython.org, runs right in your browser without needing to install anything.
And despite the name, Python for Kids is surprisingly good for adults, too!
What does “Just Enough Software” look like?
Software Stack Background
Introducing an exciting new product that we’ll apply our skills
Component selection based on software support (vs. pure analog performance)
Hardware Setup
Booting the system
Configuring the System (and rebooting!)
The Raspberry Pi-based hardware and Linux setup mirrors that of the ADXL345 used in the Converter Connectivity Tutorial, including bringing up the pyadi-iio example. Follow the instructions for downloading and installing ADI Kuiper Linux, and editing config.txt. The only difference is the device tree overlay to be added to config.txt. For this exercise, add the following lines to config.txt:
dtoverlay=rpi-adalm-lsmspg
# Heartbeat blinky:
dtparam=act_led_gpio=20
dtparam=act_led_trigger=heartbeat
# Short GPIO 21 (pin 40) to ground for shutdown:
dtoverlay=gpio-shutdown,gpio_pin=21,active_low=1,gpiopull=up
The details of the lsmspg overlay will be covered shortly. The heartbeat blinky section configures the activity LED to pulse a heartbeat pattern, and assigns it to GPIO 20 on the Raspberry Pi header. GPIO 21 (pin 40) is configured to trigger a shutdown when shorted to ground.
Command Line Tools (Hello, AD5592r!)
IIO Oscilloscope
Device Trees: Telling Linux what’s connected
Pyadi-iio And examples
Hands-On! Working through a simple, but complete case study
Next Steps: Developing on a remote host
Next Steps: Other languages (C++, C#, MATLAB, etc.)
IIO as a Tool for Migrating to an Embedded Implementation
Prototyping in Linux is incredibly convenient - even if we didn’t have pre-built device tree overlays for the ADALM-LSMSPG, it’s not terribly difficult to create our own. And once the driver is bound, we can access the hardware via any of the libiio supported language bindings. If the end application is based on Linux, then we can just keep on going to the finish line - write top level code that runs directly on the target, or on a remote host via USB or Ethernet backends. But is there any value in starting with Linux if the end application will ultimately be fully embedded? You bet! The IIO supports the serial backend, and really doesn’t care if it’s talking to an actual iiod daemon running on Linux, or - a “fake” daemon running in a bare-metal application. As long as the transactions are correct, the libiio doesn’t care if it’s talking to Linux on a Raspberry Pi, bare-metal C running on an ARM microcontroller, a BASIC implementation running on a Parallax BASIC stamp, or a Forth implementation running on an 8051 CPU. This means that while you’re testing out proof of concept code in Python talking to a Raspberry Pi, your hardware team can be designing the final board with the target processor. The devices can then be exposed over the iio network backend using the “tinyiiod server”. This allows you to run the same proof of concept Python (or C or MATLAB or C#) code that previously talked to the Raspberry Pi, to talk to your actual embedded target.
To see this in action, let’s load up the pre-built ADALM-LSMSPG tinyiiod server.
Go to ADALM-LSMSPG firmware (no-OS releases),
download the adalm-lsmspg.zip file, and unzip to a convenient location. Shut
down your Raspberry Pi properly, then disconnect the 40-pin ribbon cable from the
ADALM-LSMSPG board. Install a MAX32666FTHR in the FTHR sockets, taking care to
align the pins properly. Connect the supplied MAX PICO board to the MAX32666FTHR
programming header. Connect both the MAX PICO and MAX32666FTHR to the host
computer via USB-A to Micro-B cables. Drag and drop the
adalm-lsmspg_maxim_iio.hex file into the DAPLINK DAPLINK mass storage device
(typically D: or E: on Windows systems). The DAPLINK drive will
auto-eject, and the heartbeat LED on the ADALM-LSMSPG will begin blinking.
(Almost done!)
Unlike network and USB backends, the iio serial backend is not discoverable so we will need to find out what serial port the MAX32666FTHR enumerates as.
Note
Back in “ye oldyn days” serial ports were dedicated D-SUB 9 or 25 pin connectors on the host computer, assigned to a particular COM or TTY port. Those days are mostly gone; “virtual” USB serial ports are incredibly convenient as they allow the use of standard serial port software APIs, the drawback is the port numbering can be somewhat arbitrary and inconsistent.
There are various ways to find the serial port - Device Manager on Windows, and looking for tty* ports in /dev on Linux, but we can also use IIO Oscilloscope or Scopy from the previous experiments.
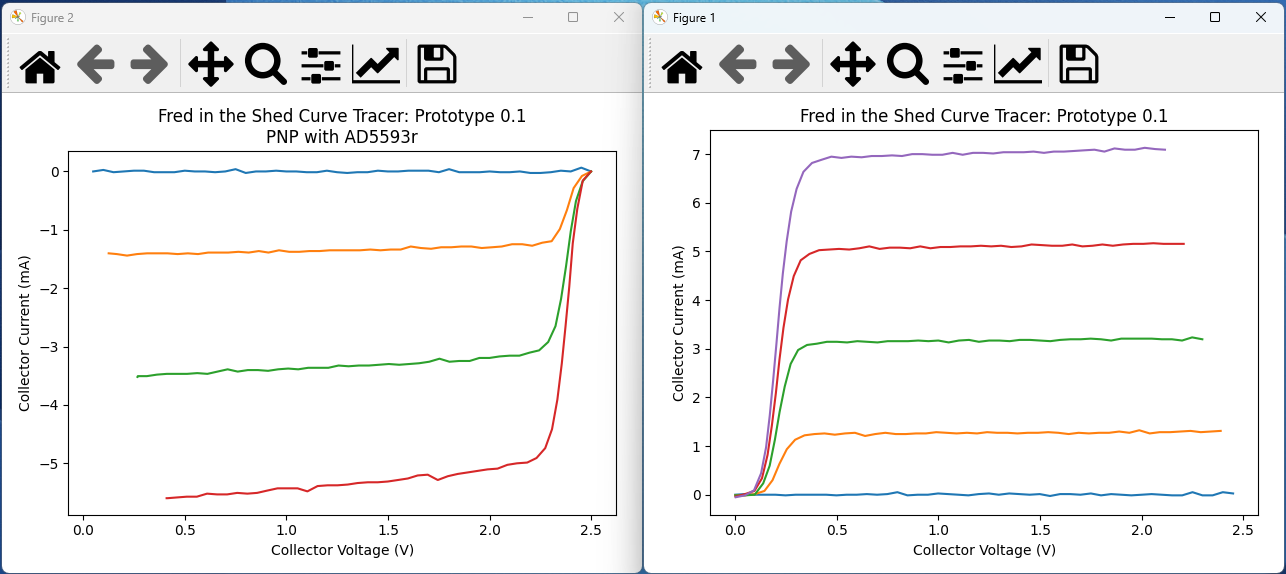
Once the serial port is located, run the same curve tracer scripts as before, but append the COM / tty port URI:
ad5592r_curve_tracer.py -u serial:COMx
ad5593r_curve_tracer.py -u serial:COMx
where “x” is the COM port number identified. The output should be identical to previous runs using the local backend, as shown in Figure 1
At this point you can re-verify your top-level code, but on the actual target hardware (vs. evaluation boards or crude prototypes). While the devices and curve tracer application on the ADALM-LSMSPG are not terribly sensitive to noise, more sensitive applications - precision instrumentation, communications, sensing, etc. - will absolutely benefit from a quick check before beginning the potentially long embedded firmware development process.
Porting to a Fully Embedded System
Once the hardware is validated using the tinyiiod server, the process of migrating to a fully embedded system can begin. The no-OS's documentation is Analog Devices’ bare metal framework for embedded systems, supporting Maxim and Analog Devices processors, as well as STM32, Raspberry Pi pico, AMD Xilinx and Altera soft processors, freeRTOS, ChibOS, and others. The framework is designed to be easily portable to other platforms as well.
Let’s now migrate the curve tracer logic that until now ran in Python on a remote host into the embedded target, replacing the tinyiiod server entirely. While the ultimate goal of the curve tracer is to have a local display, that’s another layer of both hardware and software development that we can defer a bit longer with a little bit of creative thinking. Since there is a serial port available, we can test out the logic by printing values to a terminal, formatted as comma-separated variable (CSV) data for easy copy/paste into LibreOffice or other spreadsheet for plotting. And for a bit of icing on the cake and nostalgia, we can also make an ASCII-art plot!
Go back to the zip file from the no-OS release, and drag-and-drop the curve tracer example HEX file into the DAPLINK drive. Press the RESET button on the ADALM-LSMSPG and observe the output. The CSV data and ASCII-art plots will be printed to the terminal as shown in the figures below.
=== AD5592R (SPI) - NPN Curve Tracer (Ic vs Vc) ===
Y-axis: Ic (0 to 7.16 mA)
X-axis: Vc (0 to 2.45 V)
+------------------------------------------------------------+
| ****** ***** ***** ***** ***** ***** ** * |
| * |
| * |
| * |
| |
| * ** ***** ***** ***** ***** ***** ***** ***** * |
| * * |
| * |
| ** |
| * |
| * *** ***** ***** ***** ***** ***** ***** ***** ** |
| *** |
| * |
| ** |
| ** |
| * ***** ***** ***** ***** ***** ***** ***** ***** *** |
| * * |
| *** |
|****** **** ***** ***** ***** ***** ***** ***** ***** **** *|
| |
+------------------------------------------------------------+
0.0 0.49 0.98 1.47 1.96 2.45 V
===== AD5592R Curve Trace Complete =====
Similarly, you will see an ASCII-art PNP curve trace similar to the figure below.
=== AD5593R (I2C) - PNP Curve Tracer (Ic vs Vc) ===
Y-axis: |Ic| (0 to 5.62 mA)
X-axis: Vc (0 to 2.50 V)
+------------------------------------------------------------+
| ***** ****** ***** ****** ***** ****** ***** ****** *******|
| * |
| ** |
| ** |
| ** ****** ***** ****** ****** ***** ****** ***** **** * |
| * |
| * |
| * |
| * * |
| |
| ***** ******* * |
| ***** ****** ****** ***** ****** * * |
| |
| * |
| * |
| |
| *** |
| * ** ****** **** |
| ** ****** ****** ****** ** * |
| * |
+------------------------------------------------------------+
0.0 0.50 1.00 1.50 2.00 2.50 V
===== AD5593R Curve Trace Complete =====
At this point all of the math, algorithms, and overall operation of the curve tracer are running in the embedded target, and we’re able to verify everything is operating properly and with full (analog) performance. The next step can be to connect a local display, or enable a server for display on a remote screen such as a tablet or mobile device.
Next Steps: No-OS development on Linux? You bet!
…but I’m Confused… No-OS means no Operating System, but we’re using Kuiper Linux, and that’s an Operating System. What gives?
Unlike the IIO drivers used in the previous tutorial , which require the Linux kernel and operating system to function, No-OS provides a portable software stack which can run on any platform that supports a C compiler. This could be bare metal microcontrollers, truly running without an operating system, up through full systems like our Kuiper Linux running on a Raspberry Pi. The No-OS repository includes existing support for the Linux OS, Real-Time Operating Systems Chibios, and mbed, Raspberry Pico, as well as hardware support for Maxim/ADI, STM32, AMD Xilinx and Altera. But why? Well, bringing up a toolchain for a particular embedded processor has its own set of challenges - particularly if development will begin on a standard development platform, then be ported to a custom board. Running no-OS code on Linux provides a way to get started on the embedded code development, before actually embedding. A full treatment of this flow is beyond the scope of this tutorial, but will be documented in a future tutorial.
Todo
Port the Fred in the Shed curve tracer to no-OS on Linux.