AD-R1M
Open Mobile Robot Platform Reference Design
Introduction
The AD-R1M Open Mobile Robot Platform Reference Design is a modular, extensible, and fully open-source framework developed to accelerate the design, prototyping, and deployment of autonomous mobile robots.
This reference design integrates key hardware and software components including motor control, sensor fusion, localization, navigation, and communication into a cohesive platform that supports rapid development and experimentation.
The platform supports two processing configurations:
Raspberry Pi 5 with ADI Kuiper2 for standard deployments
NVIDIA Jetson AGX Orin for GPU-accelerated workloads and visual SLAM
Features
Open-source hardware and software design
ROS 2 Humble compatible with modular node architecture
Differential drive mobile base with encoder feedback
Integrated ADI IMU (ADIS16470) for precision localization
ADI Time-of-Flight camera (EVAL-ADTF3175) for 2D/3D perception
Battery Management System with CAN-based monitoring
Support for NVIDIA Jetson AGX Orin for GPU-accelerated workloads
Zephyr RTOS firmware on embedded motor and BMS controllers
CRSF/ELRS remote control with safety killswitch
Gazebo simulation environment included
Applications
Mobile robotics research and development
Autonomous navigation and SLAM algorithm development
Warehouse and logistics automation prototyping
Educational robotics platforms
Multi-robot setup management research
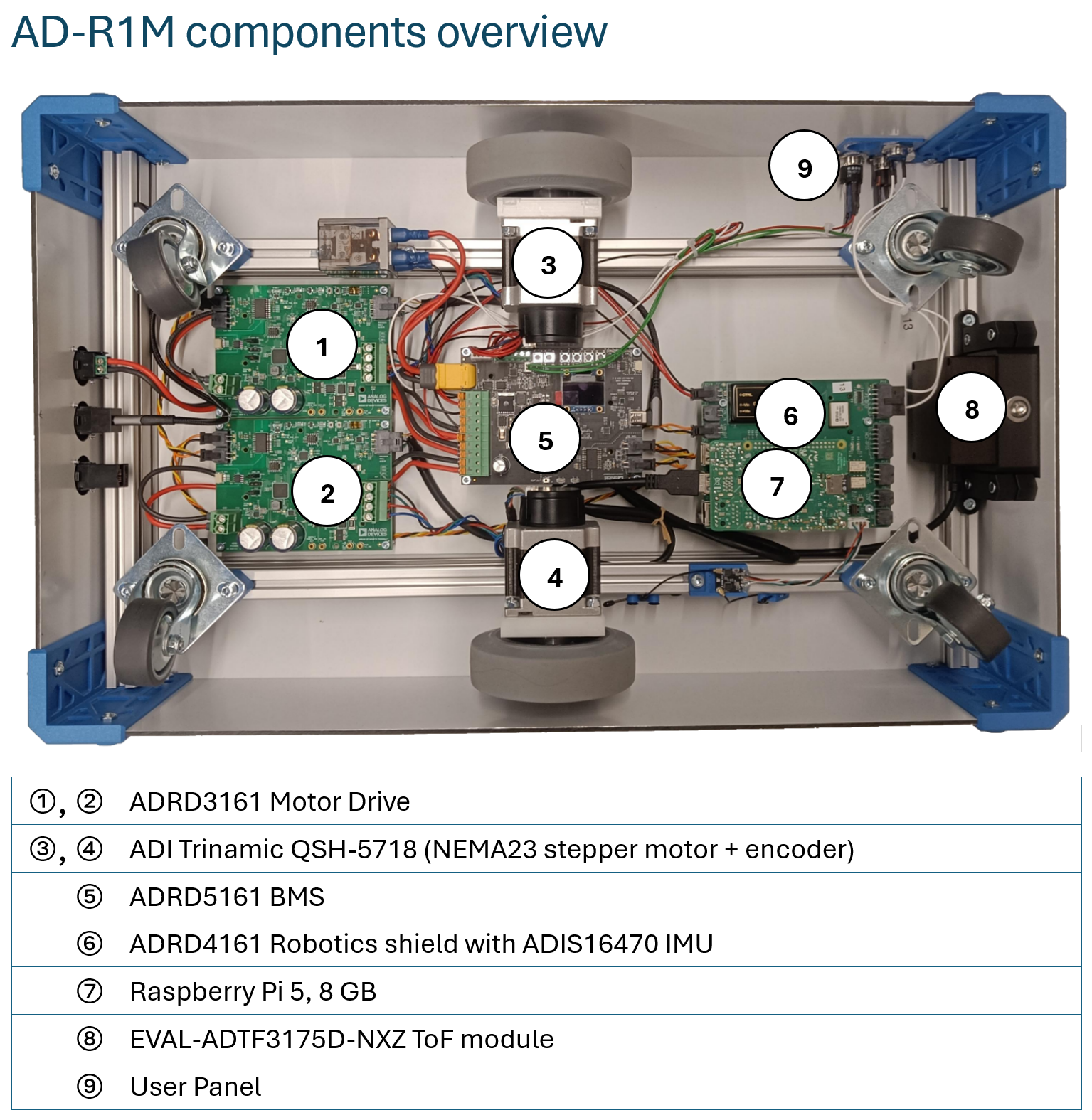
Hardware Components
The AD-R1M platform is built from modular ADI reference design boards:
Component |
Board |
Description |
Documentation |
|---|---|---|---|
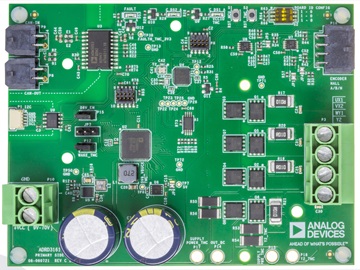
Motor Control |
|
CAN-based motor driver with encoder interface (x2) |
|
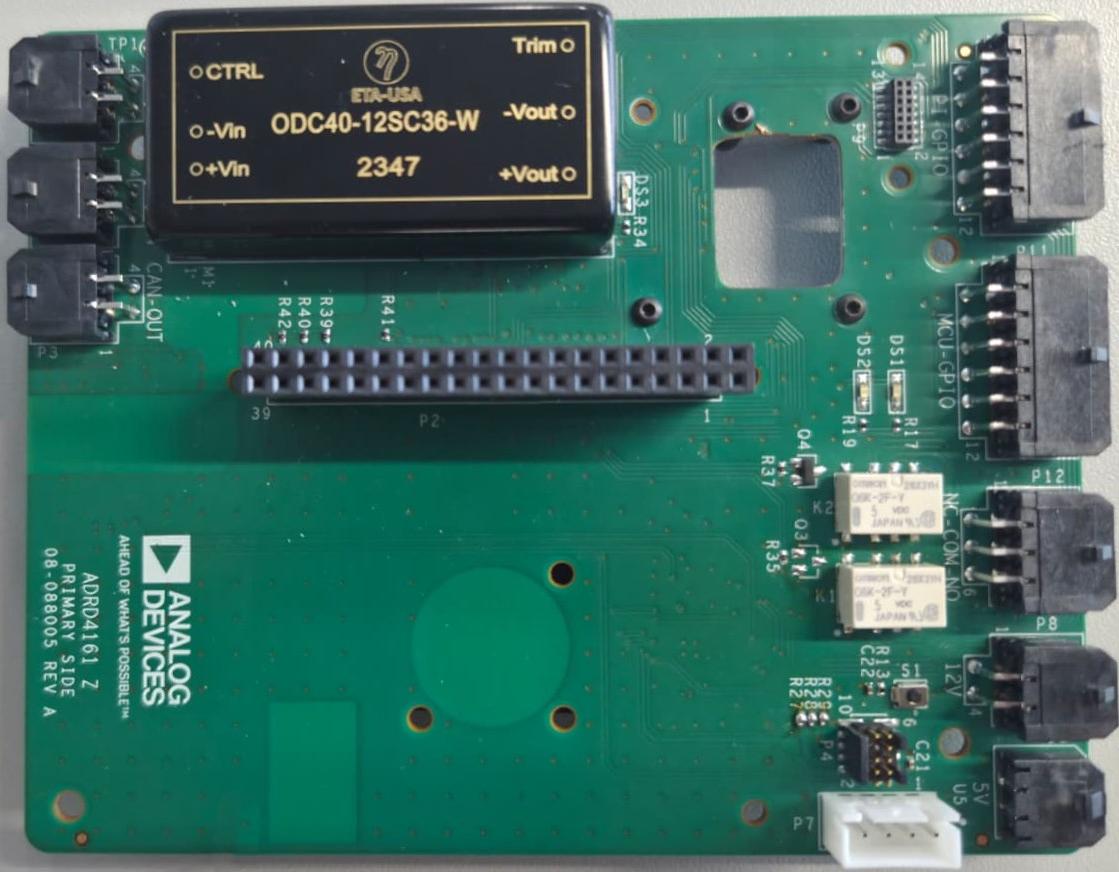
Compute Carrier |
|
Robotics perception compute carrier for Raspberry Pi |
|
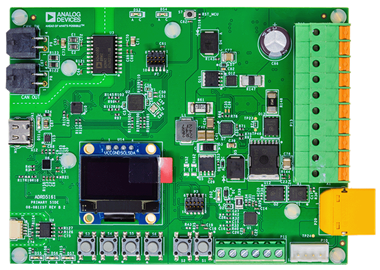
Battery Management |
|
BMS board with CAN interface (3S or 12S variants) |
|
IMU |
High-precision 6-axis IMU for localization |
||
ToF Camera |

|
Time-of-Flight depth camera for perception |
System Applications
SLAM Mapping
The AD-R1M uses the ADIS16470 IMU and EVAL-ADTF3175 ToF camera for real-time Simultaneous Localization and Mapping (SLAM). The platform supports multiple SLAM algorithms.
Nav2 Navigation
Autonomous navigation is powered by the ROS 2 Nav2 stack, providing path planning, obstacle avoidance, and waypoint following. The platform integrates sensor fusion from the IMU and depth camera.

Multi-robot Fleet
The AD-R1M supports multi-robot deployments using ROS 2 Zenoh middleware and namespacing for swarm robotics management. Fleet coordination enables sensor data acquisition, task distribution, and control across multiple robots operating in shared environments.
Gazebo Simulation
Full simulation environment for development and testing without hardware. The Gazebo models include sensor simulation for the ToF camera and IMU, enabling algorithm development and validation before deployment.
Capability Expansion
NVIDIA Jetson AGX Orin + cuVSLAM
For GPU-accelerated workloads and visual SLAM, the AD-R1M supports NVIDIA Jetson AGX Orin integration with NVIDIA Isaac ROS cuVSLAM and Intel RealSense cameras.
Key Components:
NVIDIA Jetson AGX Orin - High-performance edge AI compute
NVIDIA Isaac ROS - GPU-accelerated ROS 2 packages
cuVSLAM - CUDA-accelerated visual SLAM
Intel RealSense D455 - RGB-D camera for visual odometry
The Jetson AGX Orin is powered by the ADRD5161 BMS and communicates with the AD-R1M via Ethernet using ROS 2 middleware wrappers.

See the Jetson AGX Orin Setup Guide for full setup instructions.
GMSL Camera Integration
The AD-R1M platform can be extended with ADI GMSL camera boards for enhanced perception capabilities in robotics and autonomous systems:
Board |
Description |
|---|---|
GMSL2-to-MIPI deserializer for multi-camera vision systems |
|
GMSL2 serializer for Raspberry Pi cameras |
|
GMSL3/2 quad deserializer for surround-view applications |
|
GMSL3/2 octal deserializer for advanced multi-camera systems |
Image Processing
The ad_r1m_image_processing ROS 2 package provides real-time image processing
capabilities for GMSL camera streams:
Floor Segmentation - Uses FastSAM (Fast Segment Anything Model) to identify traversable floor regions, enabling safe navigation path planning.

Object Detection - YOLO-based real-time obstacle detection with bounding boxes and class labels for obstacle avoidance.
Getting Started
Full documentation and guides are available at the AD-R1M Documentation page:
ADI ROS 2 Ecosystem
The adi_ros2 meta-repository streamlines the use of ADI packages within ROS 2 by providing a single entry point for all ADI-supported packages. It includes CI scripts for building system dependencies from source, centralized within a Docker wrapper for reproducible builds. See the official documentation for getting started.
Related ROS 2 Packages:
Package |
Description |
|---|---|
ROS 2 driver for ADI IMUs (ADIS16470, ADIS16475, etc.) |
|
ROS 2 driver for ADI Time-of-Flight cameras (ADTF3175D) |
|
AD-R1M platform packages and documentation |
Resources
AD-R1M Repository: ad-r1m-ros2
ADI ROS 2 Meta-repo: adi_ros2
Help and Support
For questions and more information about this product, connect with us through the Analog Devices EngineerZone.