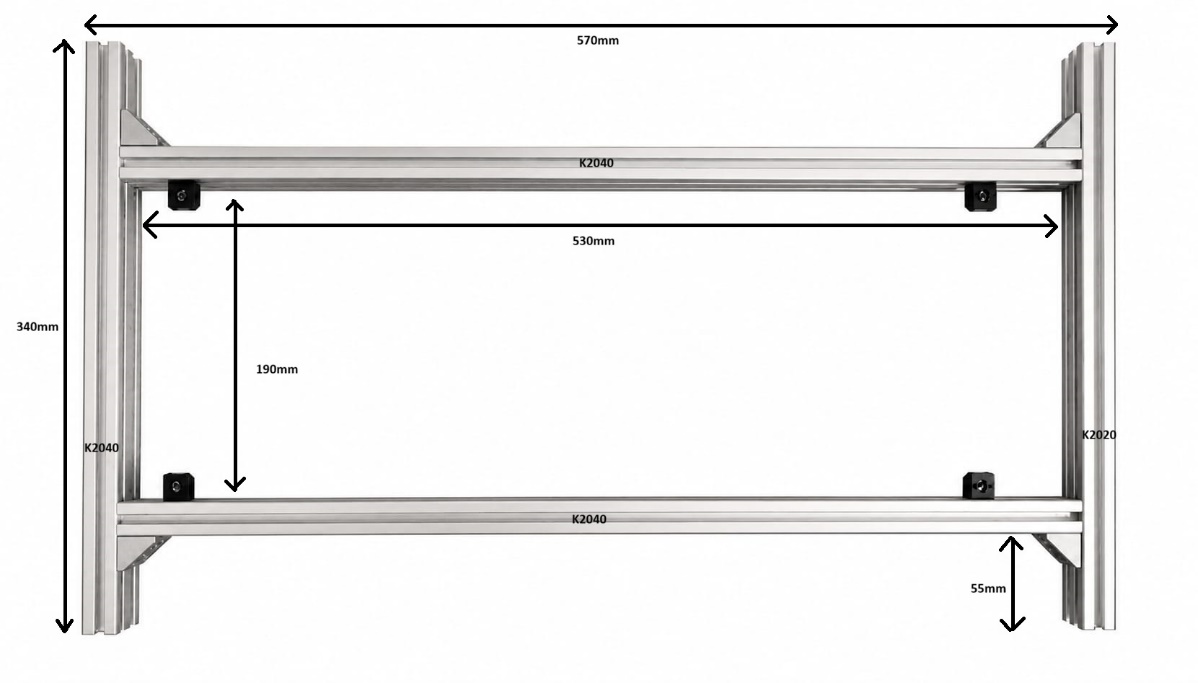
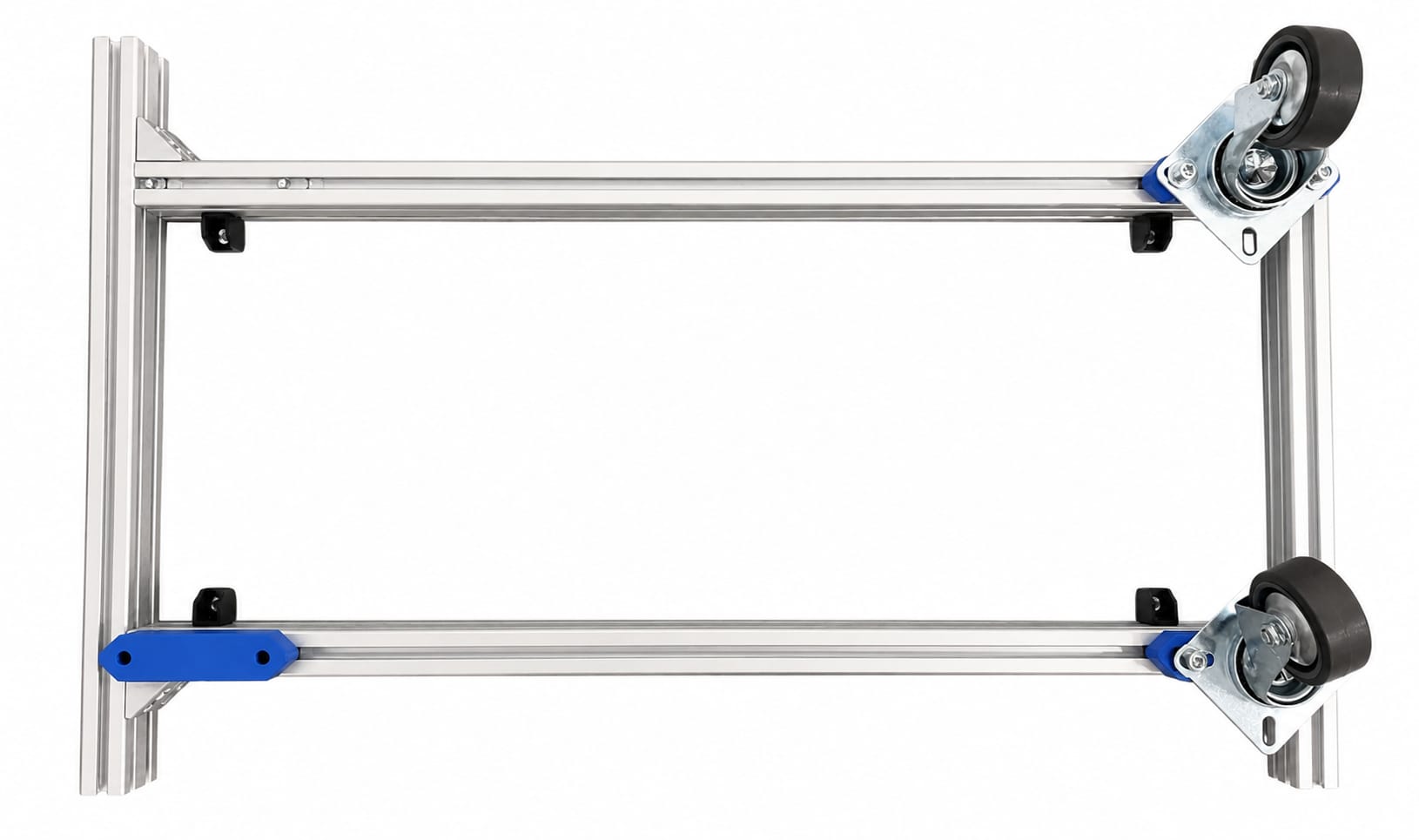
Assemble the frame using aluminum profiles and angle brackets. Ensure a rectangular
shape by measuring the diagonals. Use 2 angle brackets to connect two K2040 profiles.
Place 4 “M2” holders 30mm from the interior and 2 in the middle of the 530mm profiles.
Table 2 Parts Required
Ref
Qty
P/N
Description
M1
6
FA-093W201N05S01
Angle bracket
M2
6
A-094411M4
Panel holder
M3
1
K2020-I5 KRAFTBERG
340mm Aluminum 20X20 profile
M4
2
K2040-I5 KRAFTBERG
530mm Aluminum 20X40 profile
M5
1
K2040-I5 KRAFTBERG
340mm Aluminum 20X40 profile
M6
12
M5X8/D912-A4
Screw
M7
12
FA-096215
M5 Profile nut
Figure 1 Assembled base frame
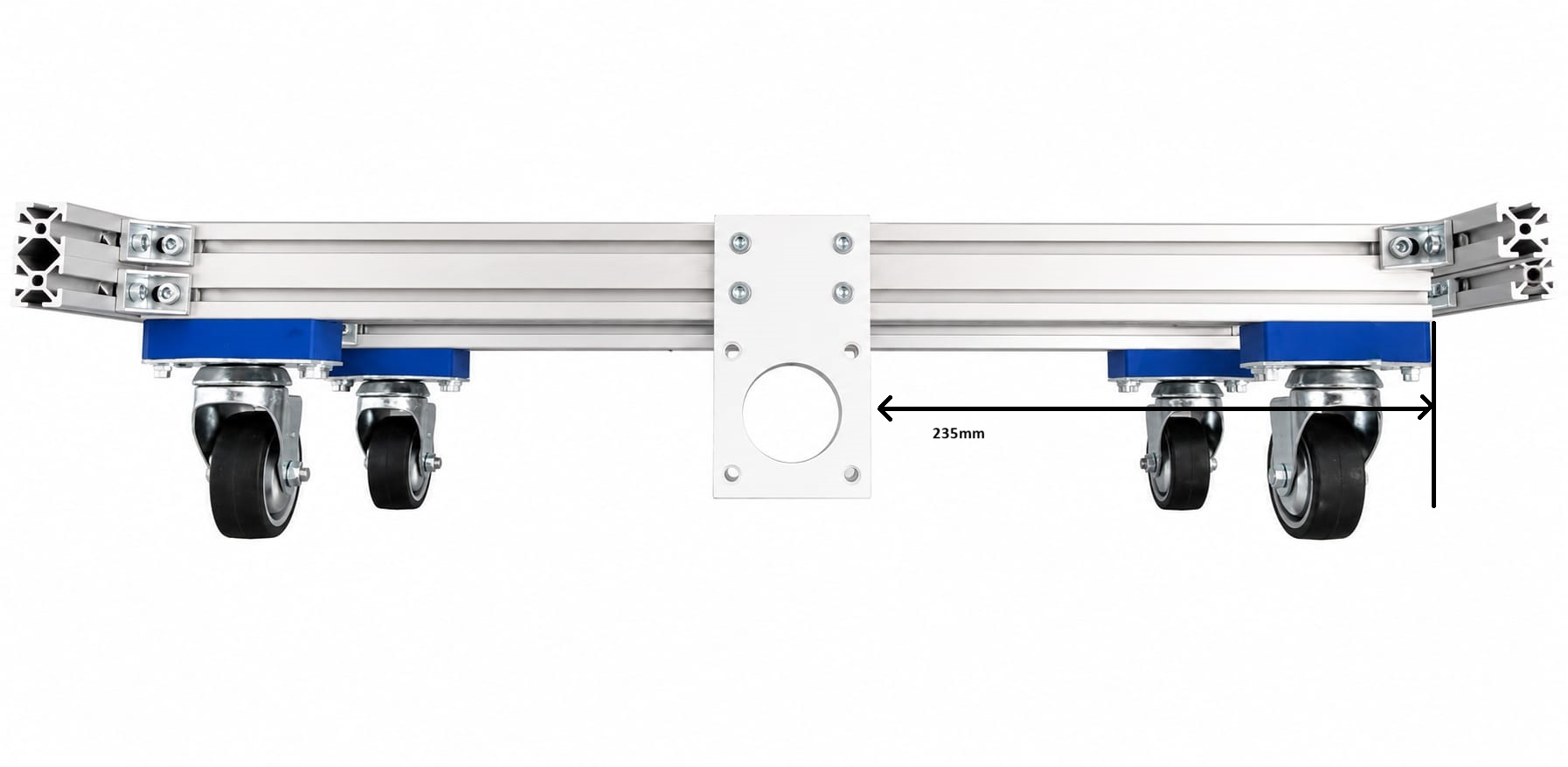
Step 2: Caster Wheels
Attach the caster wheels using the 3D printed 16mm caster raisers (3D1).
Table 3 Parts Required
Ref
Qty
P/N
Description
M8
4
JDPE-0501-1001
Casters
3D1
4
N/A
16 mm caster raiser
M7
8
FA-096215
M5 profile nut
M9
8
B5X25/BN3
M5 25mm screw
M10
8
B5/BN715
5mm washer
Figure 2 Caster wheel installation
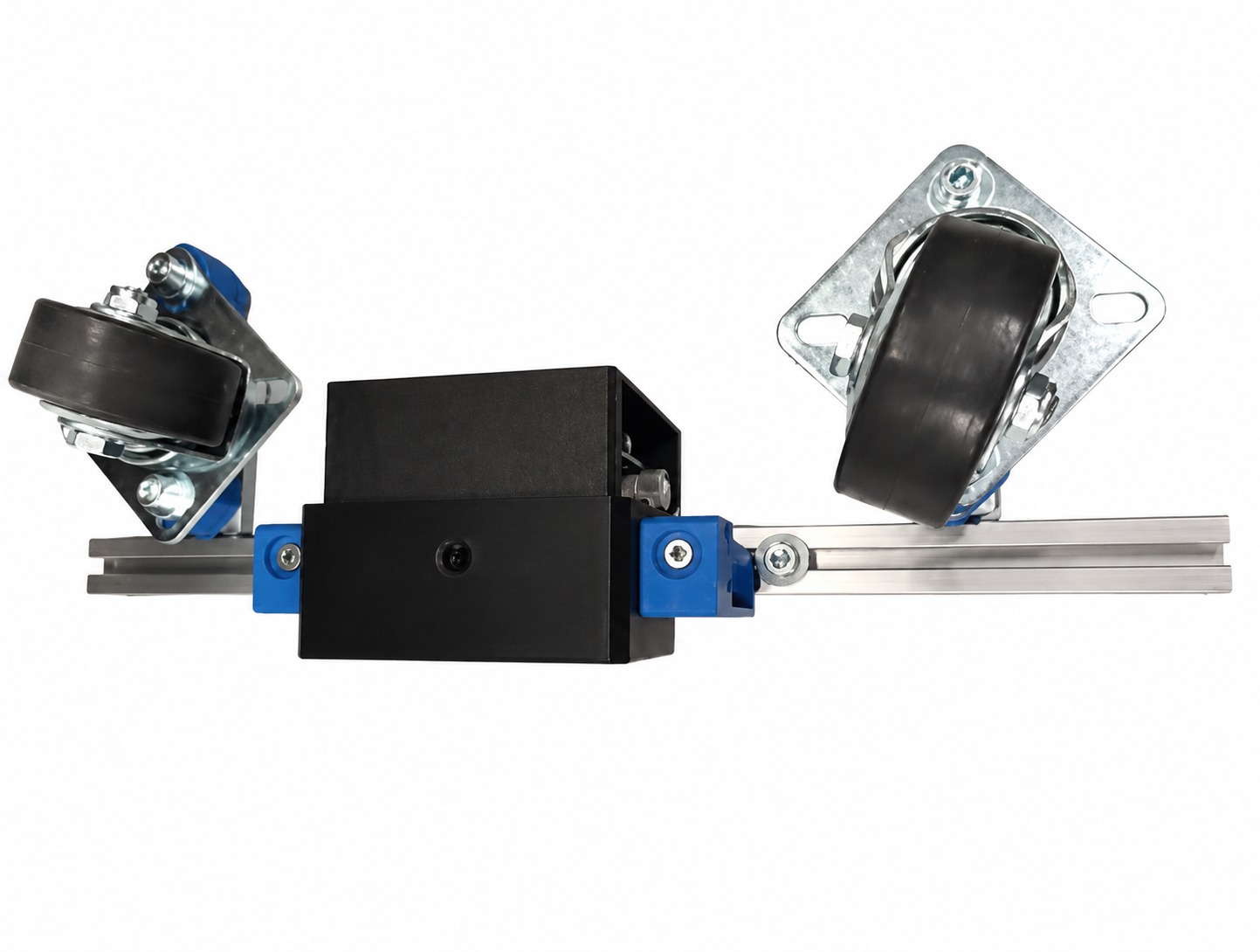
Step 3: Motor Mounts
Install the motor mounts (3D2) in the center of the 530mm longitudinal profiles.
Table 4 Parts Required
Ref
Qty
P/N
Description
3D2
2
N/A
Motor mounts
M7
8
FA-096215
M5 profile nut
M11
8
B5X10/BN3
M5 10mm screw
Figure 3 Motor mount placement
Step 4: Motors
Install the NEMA 23 stepper motors onto the motor mounts.
Table 5 Parts Required
Ref
Qty
P/N
Description
M20
8
B5X16/BN3
M5 x 16 screw
M12
8
B5/BN161
M5 nut lock
ADI1
2
QSH5718-51-28-101-10K
NEMA 23 stepper motor
Figure 4 Motor installation
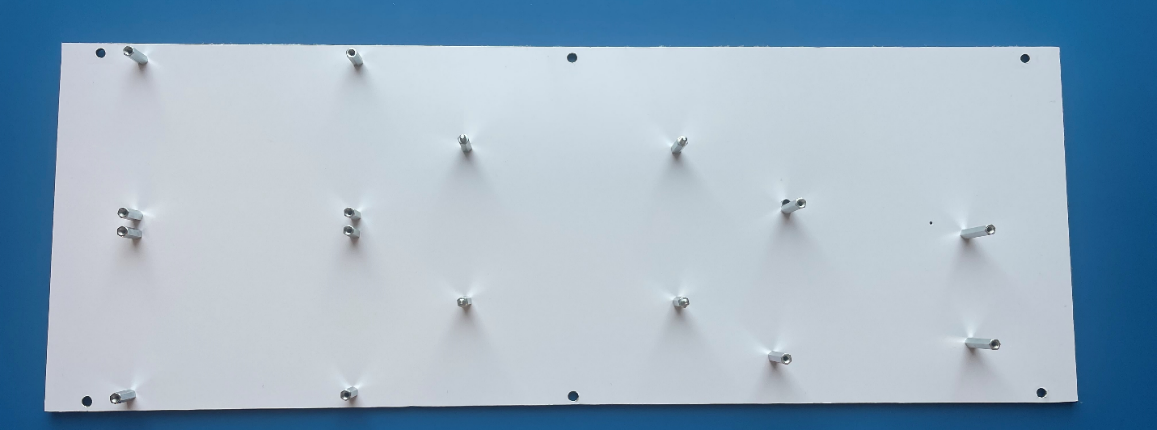
Step 5: Camera Mount
Install camera mounts 116.5mm from the side, 135.5mm from camera position.
Camera mounts and housing are 3D printed.
Table 6 Parts Required
Ref
Qty
P/N
Description
M13
2
B4X8/BN3
M4 x 8 HEX
M14
2
B4/BN1074
M4 Washer
3D3
2
N/A
Camera mount brackets
3D4
1
N/A
Camera housing
ADI2
1
EVAL-ADTF3175
ToF depth camera
Figure 5 Camera and mount assembly
Step 6: Wheel Assembly
Install the wheel assemblies on the motor shafts.
Table 7 Parts Required
Ref
Qty
P/N
Description
3D5
2
N/A
Wheel assembly
Electronics Assembly
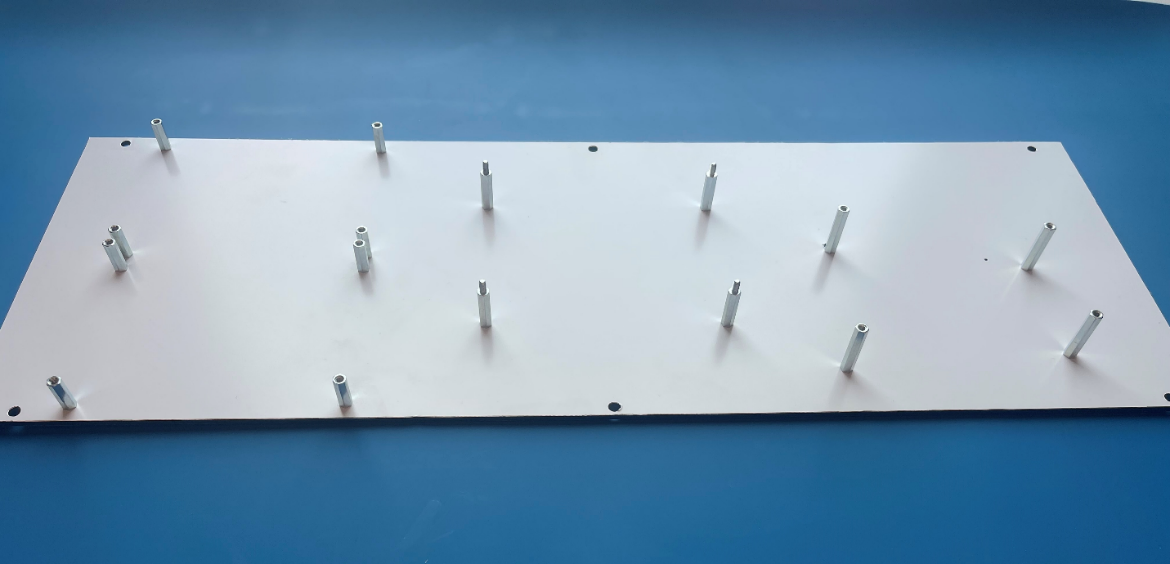
Step 1: Board Spacers
Place the board spacers on the electronics mounting plate.
Table 8 Parts Required
Ref
Qty
P/N
Description
3D6
1
N/A
Electronics mounting plate
M15
8
M3X15/DR213
Standoff TFF
M16
4
M3X20/DR113
Standoff TFM
M17
4
M3X25/DR213
Standoff TFF
M18
16
M3X5/D7985
Screw
Figure 6 Spacer layout (top view)
Figure 7 Spacer layout (side view)
Figure 8 Standoff detail view
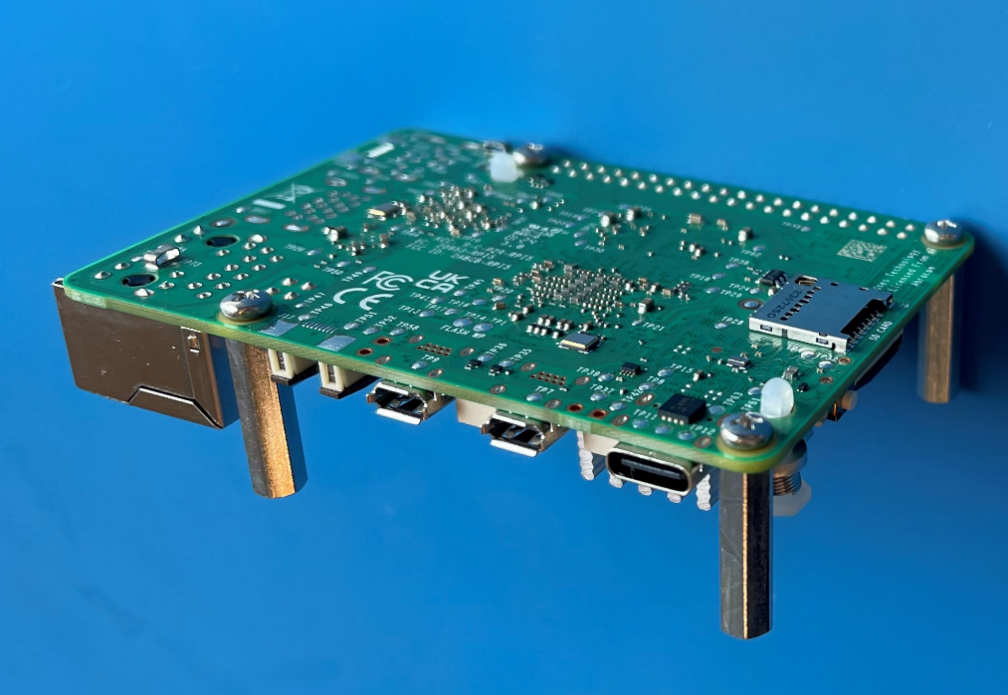
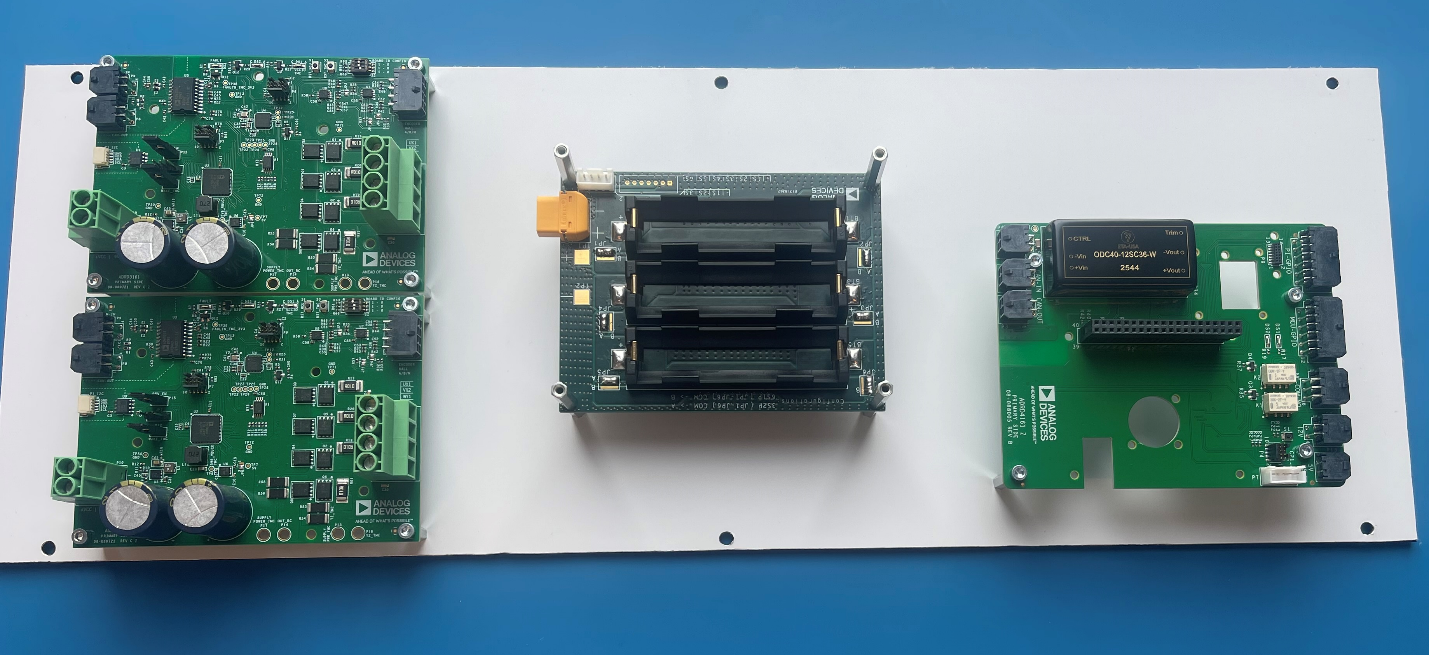
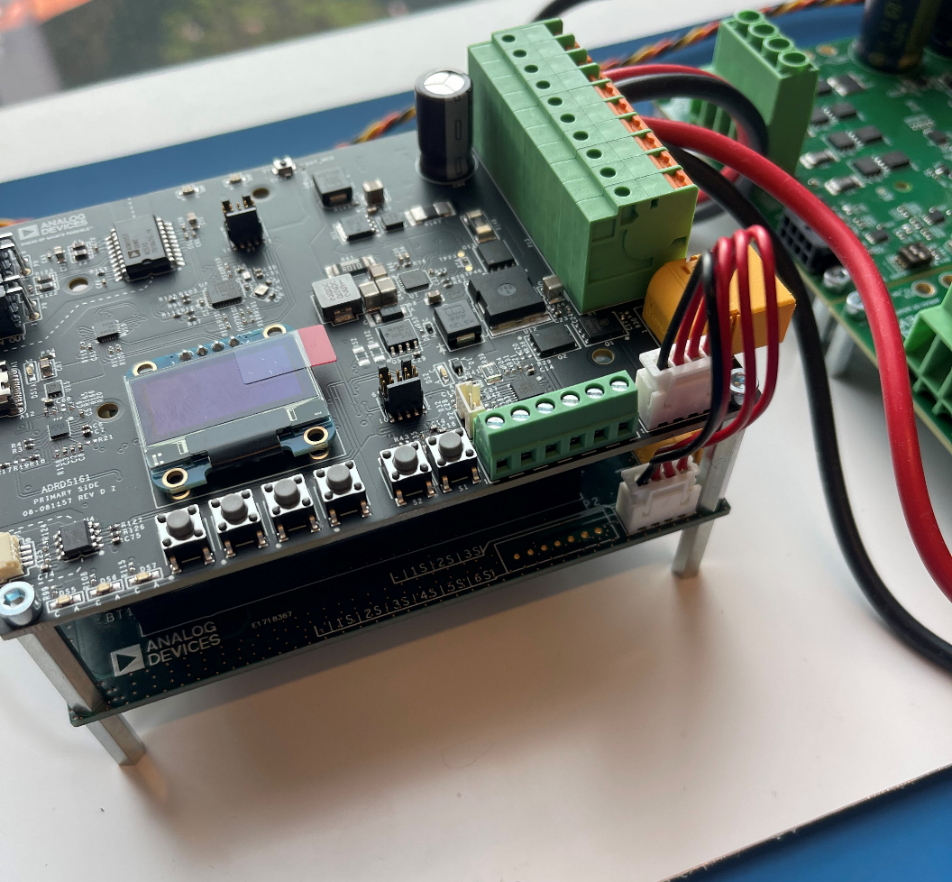
Step 2: PCB Installation
Install the PCB sub-assemblies. The BMS board mounts above the battery holder
on 4x M3X25 standoffs.
Table 9 Parts Required
Ref
Qty
P/N
Description
M19
16
B3X5/BN610
HEX Screw
M17
4
M3X25/DR213
Standoff TFF
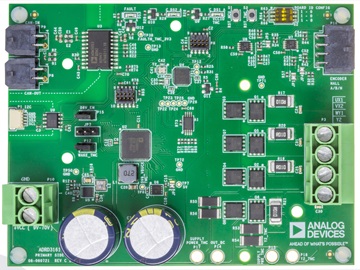
ADI3
1
ADRD3161
Motor Control PCB
ADI4
1
ADRD5161
BMS
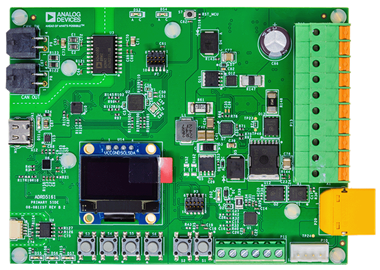
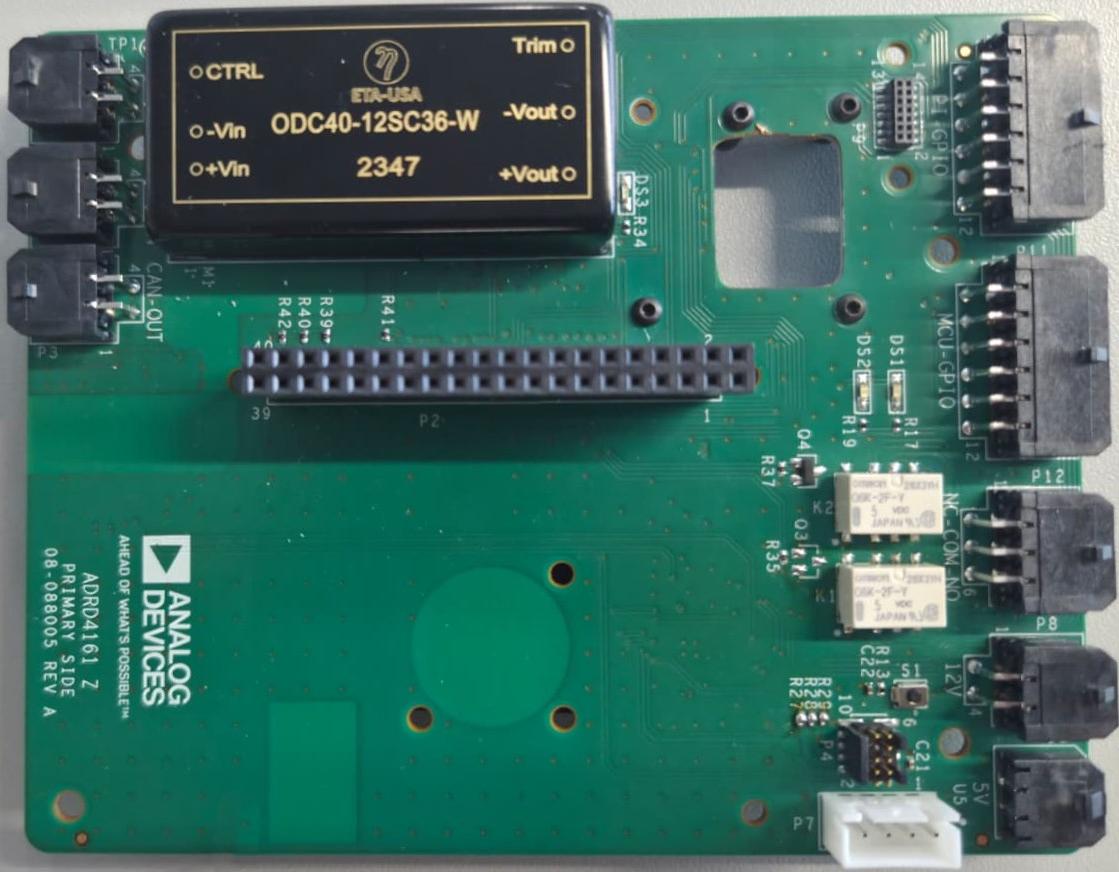
ADI5
1
ADRD4161
Compute Carrier
ADI6
1
N/A
Battery Holder
E1
1
RPi 5
Raspberry Pi 5 SBC
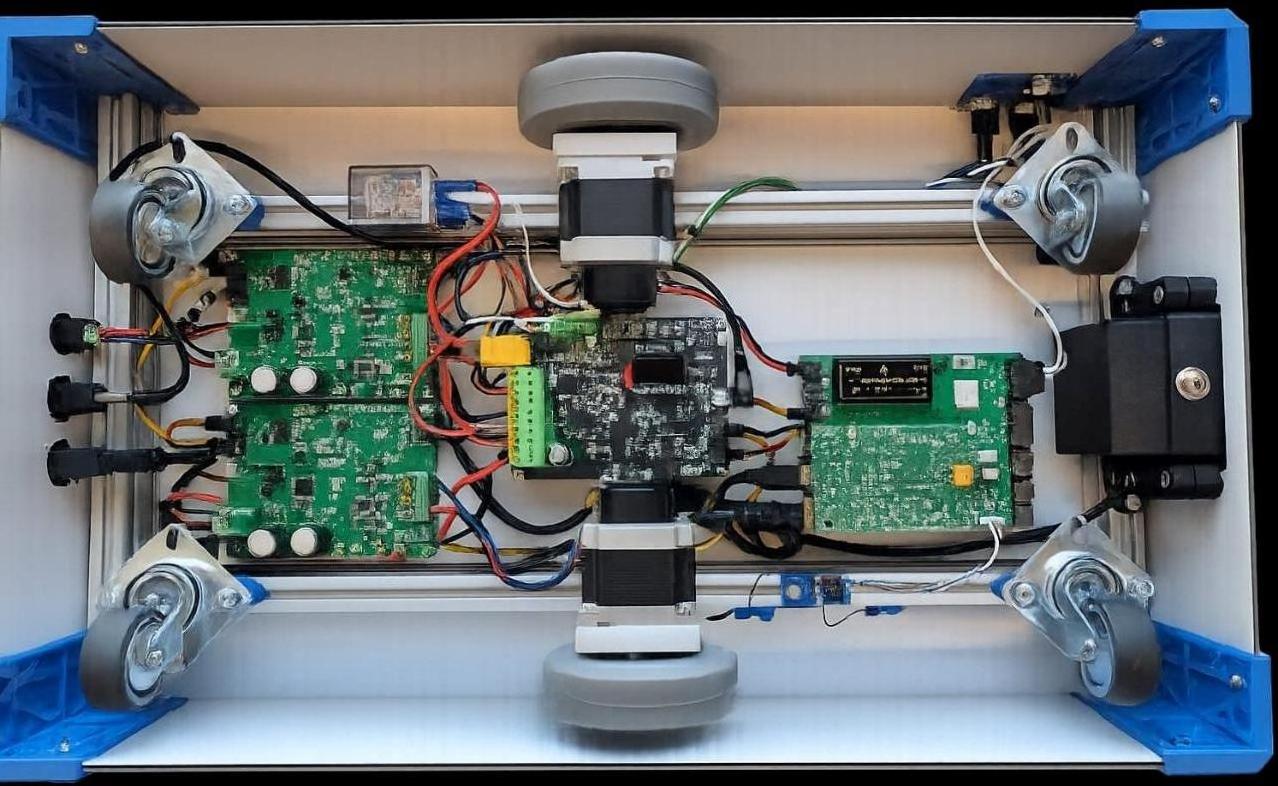
Figure 9 Complete electronics assembly
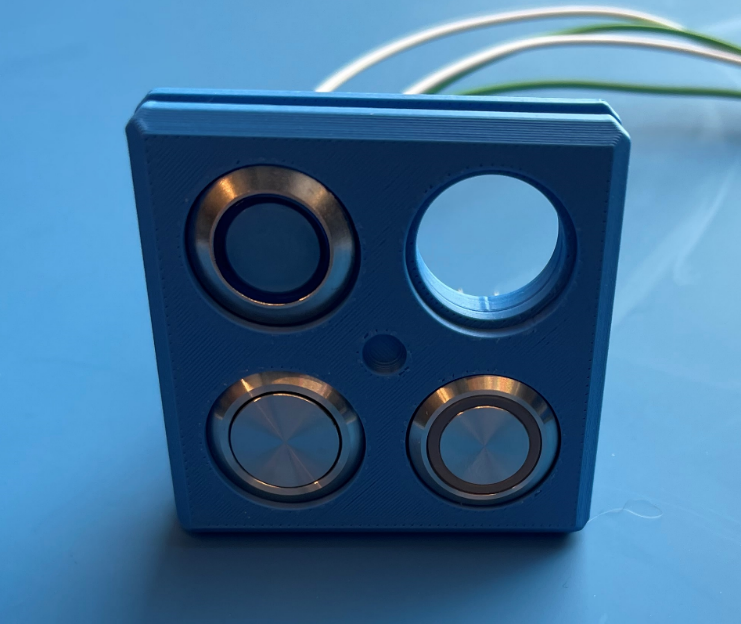
Control Panel
Table 10 Parts Required
Ref
Qty
P/N
Description
E2
1
IND16-12B-C
Status LED
E3
1
82-4151.1000
SPDT Button
E4
1
82-4151.1123
SPDT Button
3D7
1
N/A
3D Printed Front Panel
Figure 10 Front panel layout
Figure 11 Panel with components
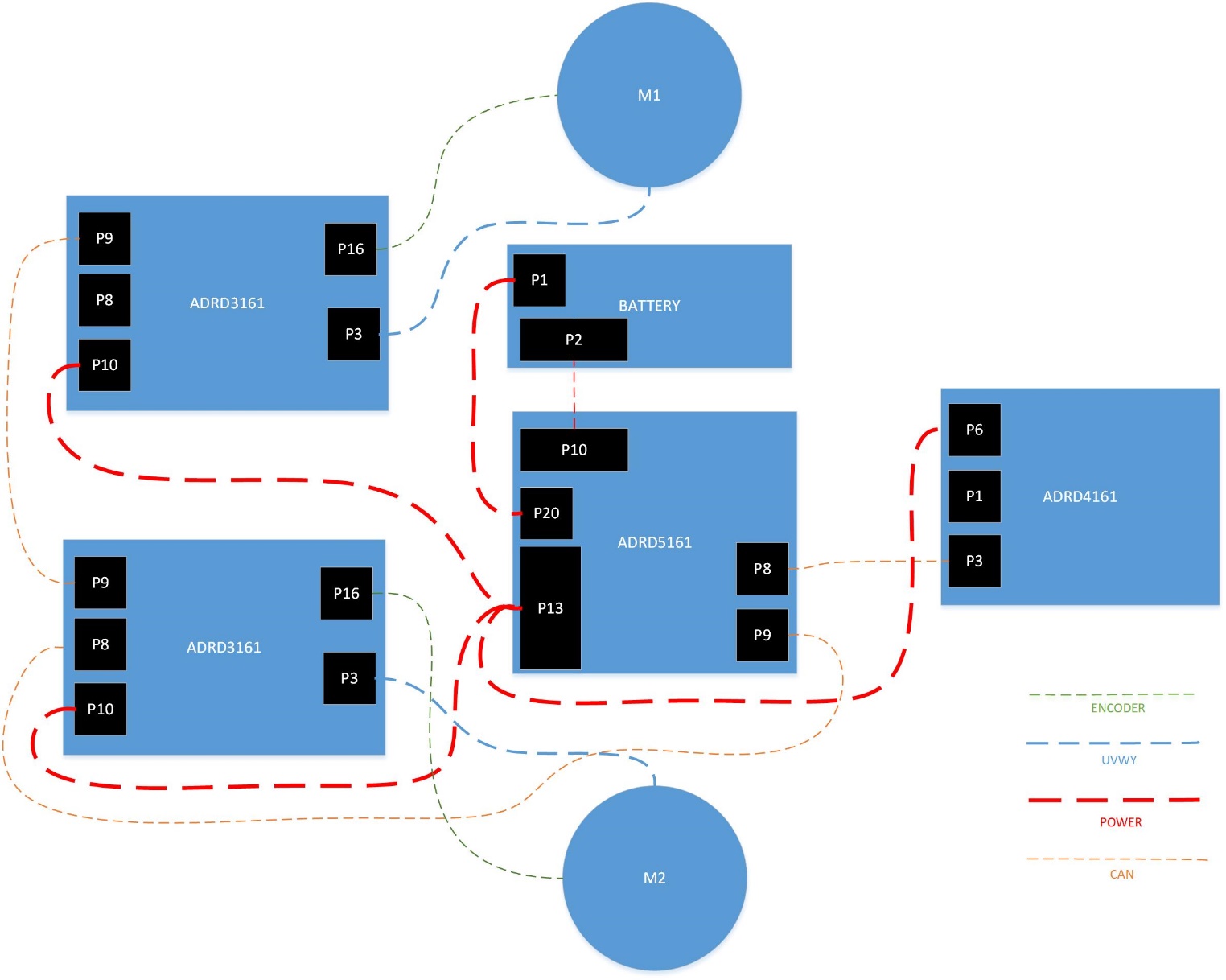
Wiring Harness
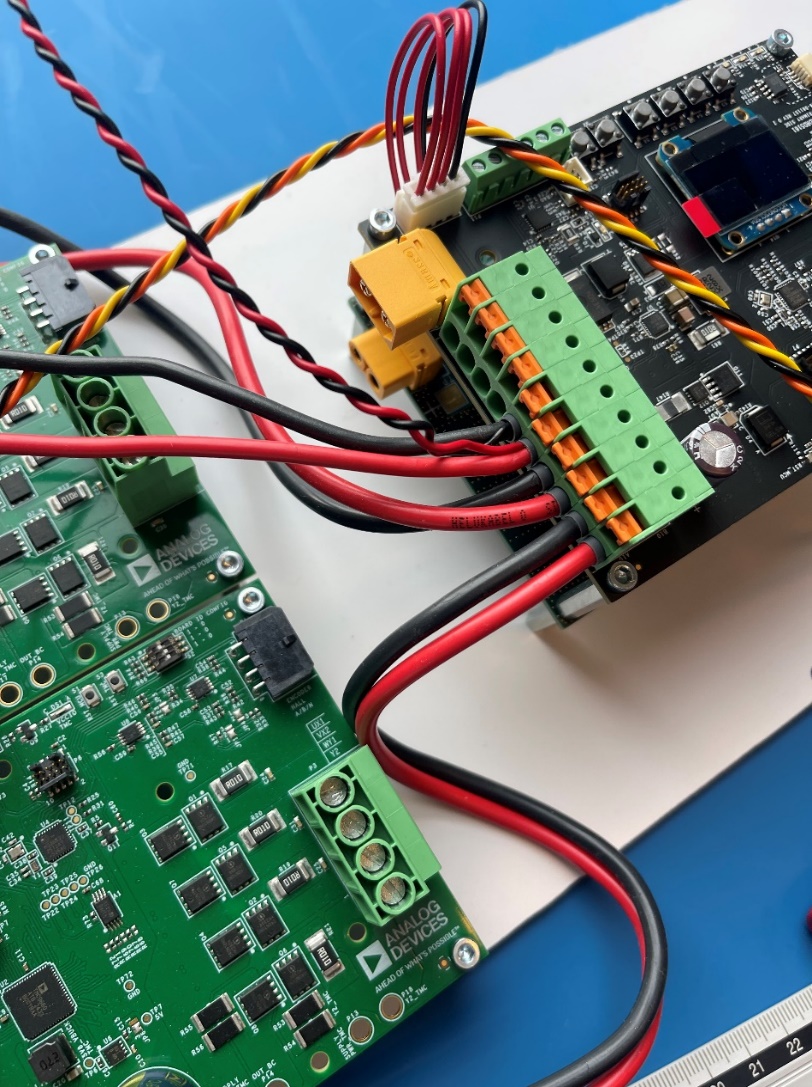
Figure 12 Main wiring diagram
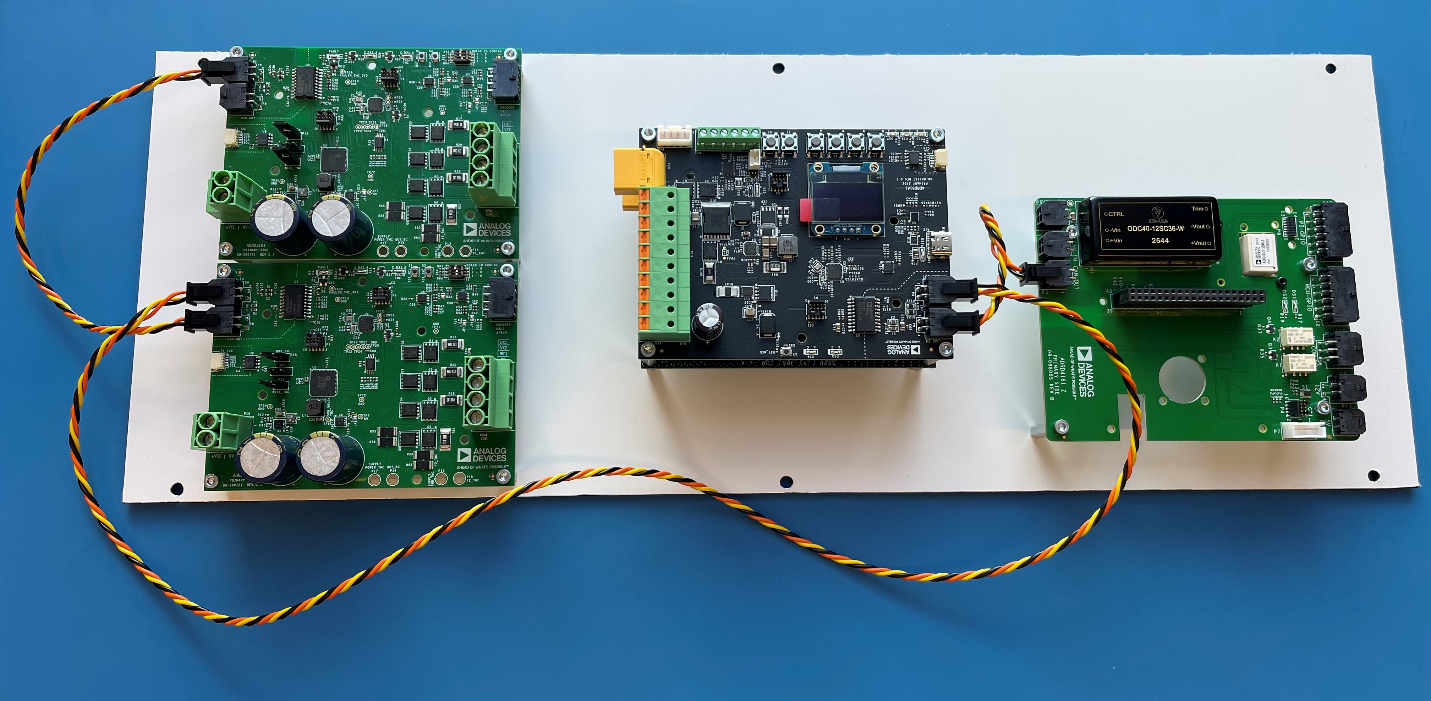
Wiring Overview
Figure 13 System wiring overview
Figure 14 Connection routing
Figure 15 Wire bundle organization
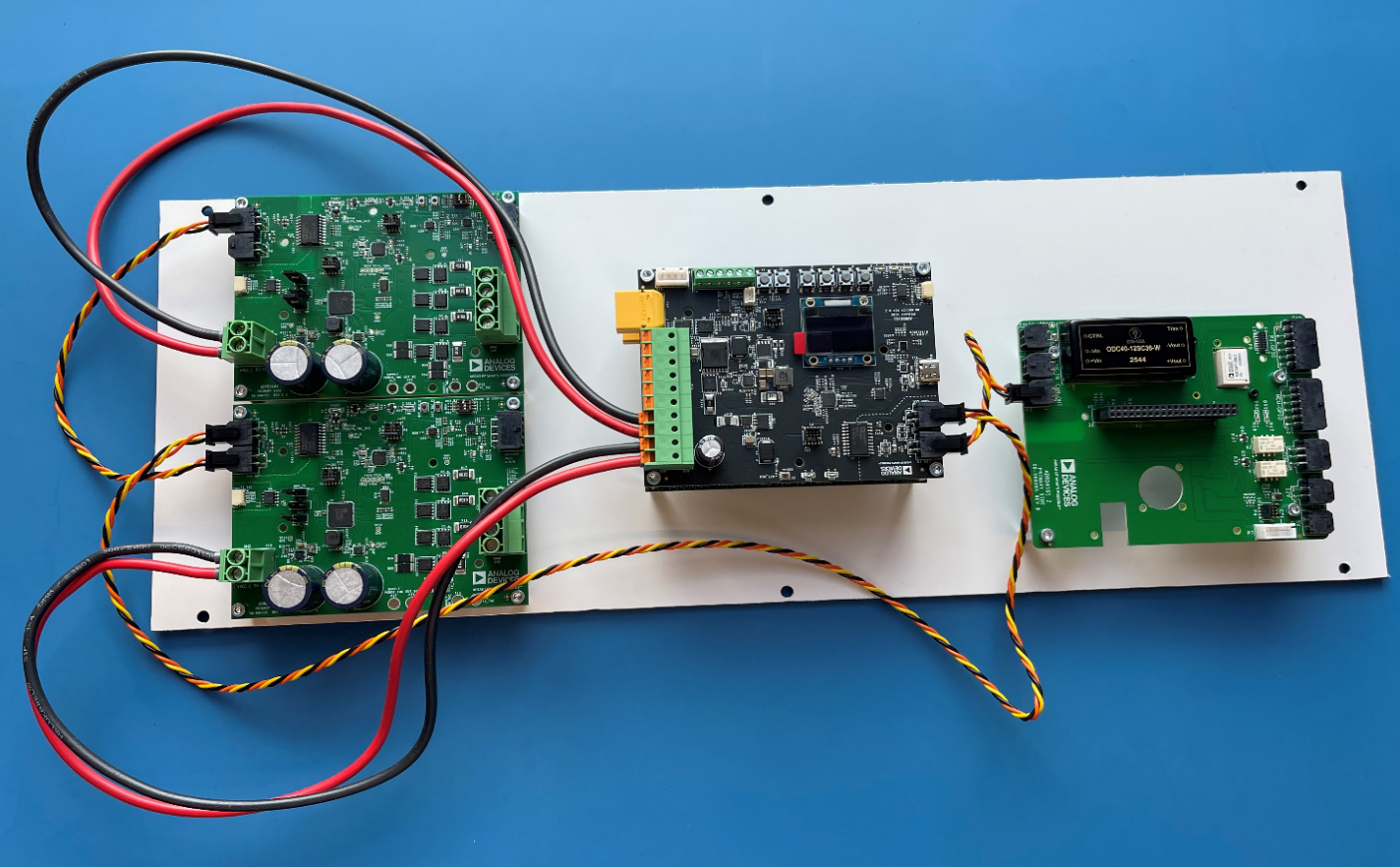
Figure 16 Completed wiring harness
Wire Assemblies
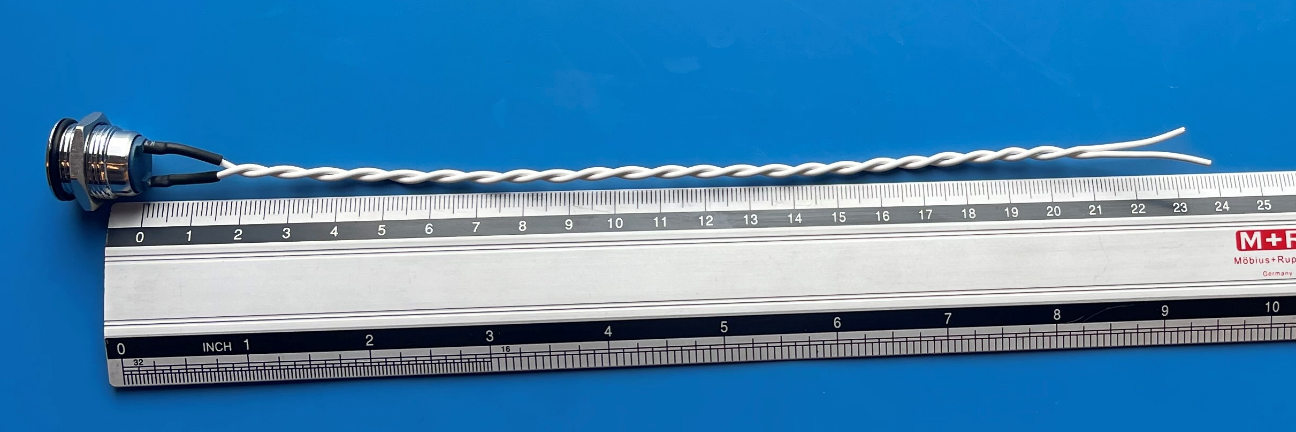
CAN Bus Cable
Twisted pair + GND with Molex Micro-Fit 3.0 43025-0400 connectors on both ends.
Figure 17 CAN bus cable assembly
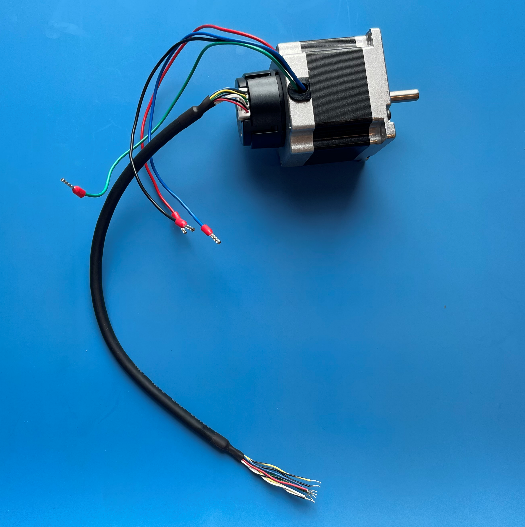
Motor Encoder Cable
Wire assembly with Molex Micro-Fit 3.0 43025-0800 connector on the motor
control board side. See ADRD3161 documentation for details.
Figure 18 Motor encoder cable pinout
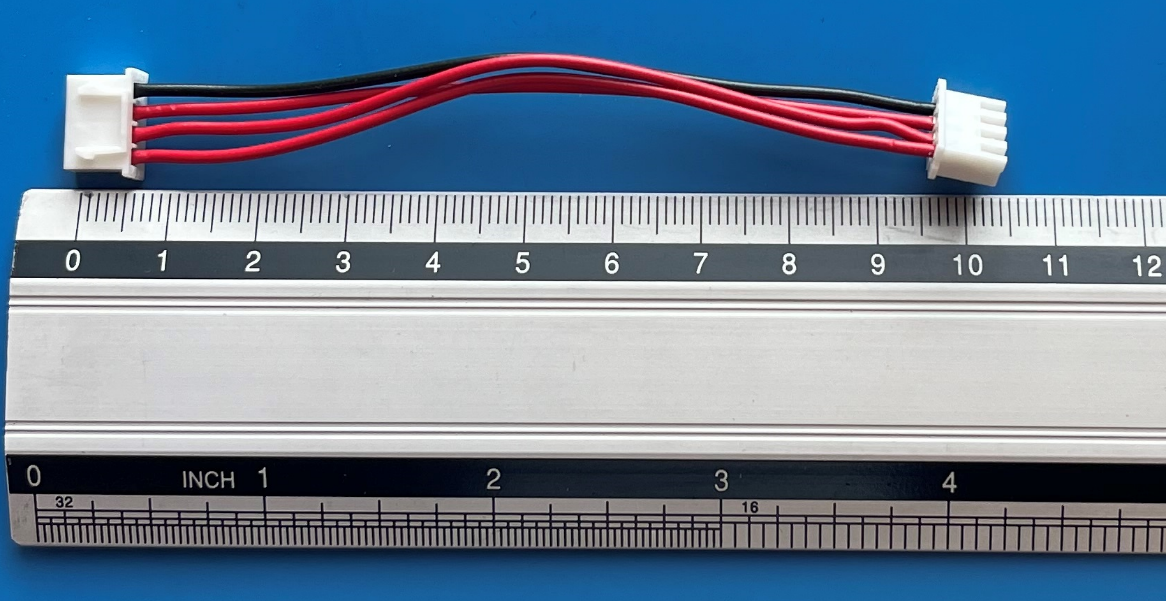
Battery Balancing Cable
4-wire assembly with JST XHP-4 connectors on both ends.
Figure 19 Battery balancing cable schematic
Figure 20 Completed cable
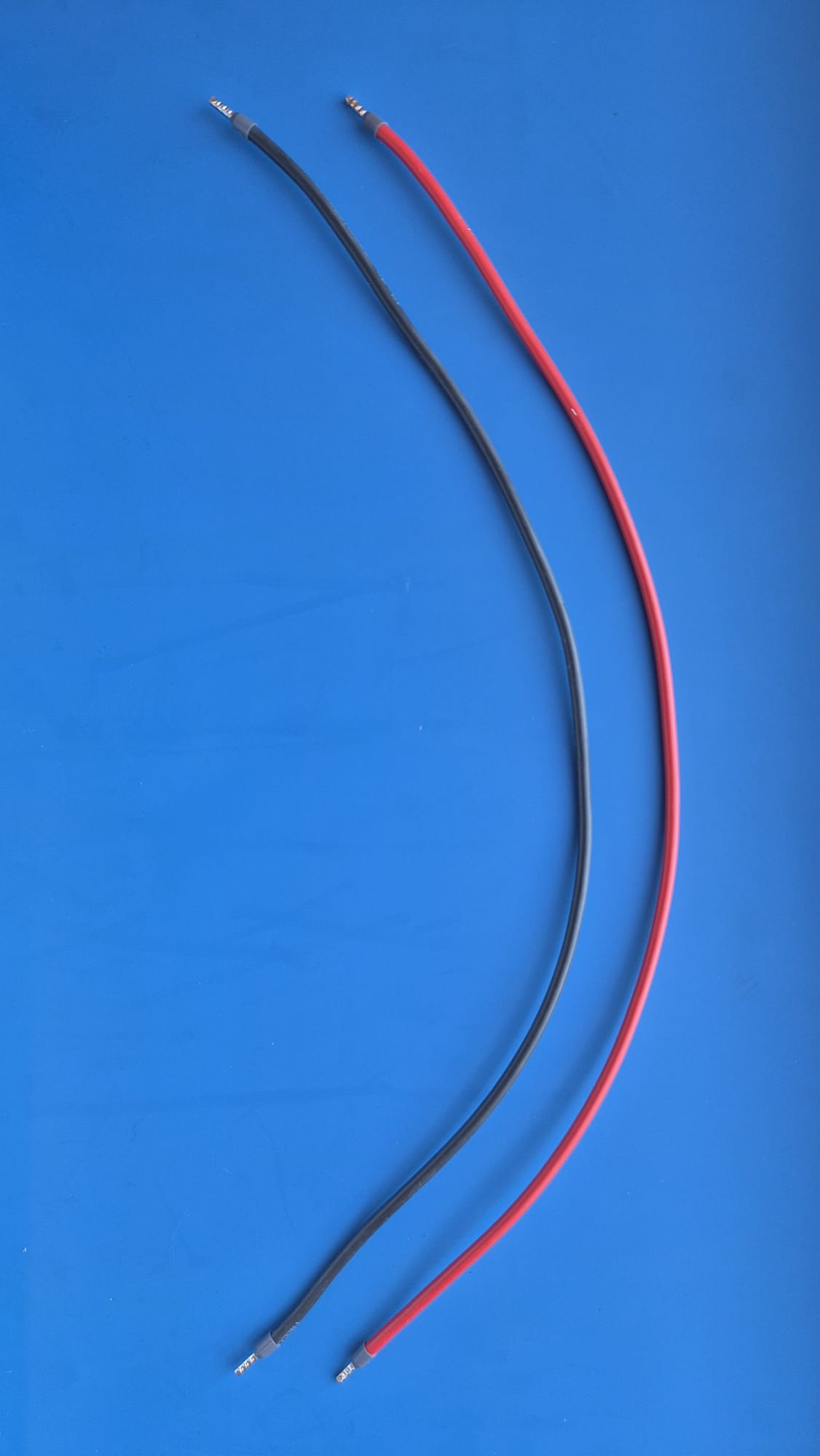
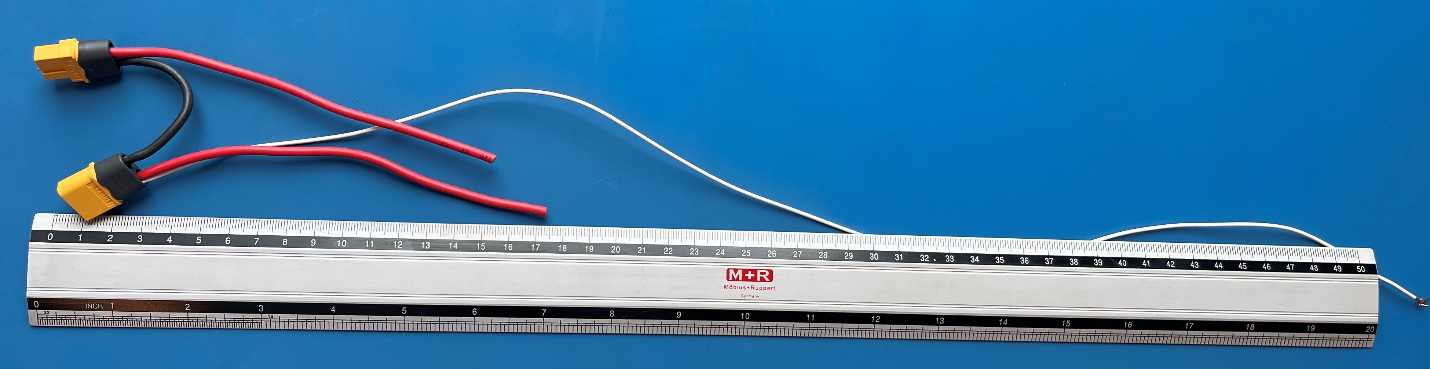
Power Cables
2.5mm wires with bootlace ferrule
450mm length from BMS to motor control board (2 pairs)